11 - VBOX 3i DGPS / RTK

Mehr zu DGPS und wie es funktioniert, finden Sie hier. Klicken Sie hier für Information zu RTK.
VBOX 3i unterstützt jetzt den RTK-Anschluss über NTRIP. Information zur Konfiguration finden Sie hier.
Aktivieren des DGPS-Modus
Bevor VBOX die von einer lokalen Basisstation übermittelten DGPS-Korrekturdaten empfangen und nutzen kann, muss der richtige DGPS-Modus über VBOX-Tools oder VBOX-Manager aktiviert werden.
Installation mit VBOX Tools
- Starten Sie die neueste VBOX-Tools-Software.
- Öffnen Sie das VBOX-Setup, und gehen Sie zu der GPS-Seite.
- Klicken Sie auf die Schaltfläche DGPS und wählen Sie den richtigen DGPS-Modus unter den verfügbaren Optionen.
- Schließen Sie das VBOX-Setup.
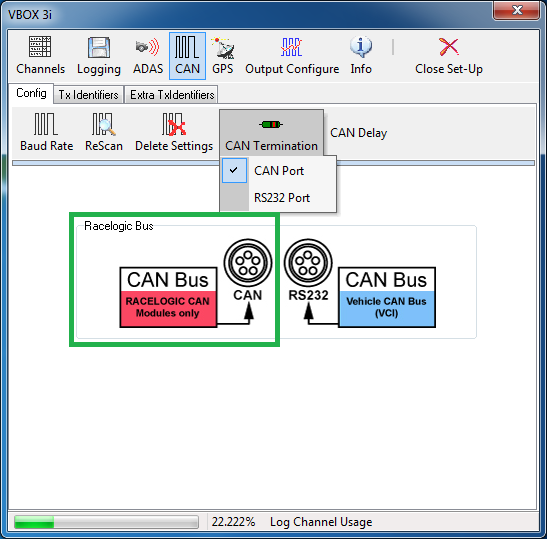
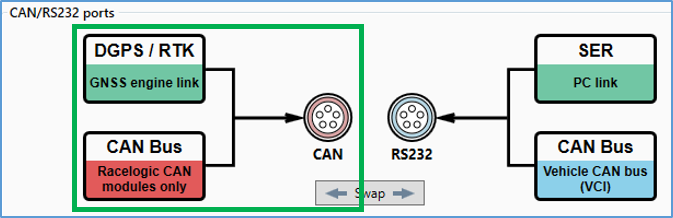
Hinweis: Stellen Sie sicher, dass der Racelogic-Bus im CAN-Menü dem CAN-Port zugewiesen ist.
Installation mit VBOX Setup
- Starten Sie die neueste VBOX Setup-Software.
- Wählen Sie den entsprechenden COM-Port und gehen Sie zum Menü GPS.
- Klicken Sie auf die Option DGPS und wählen Sie den richtigen DGPS-Modus aus den verfügbaren Optionen.
- Schließen Sie den VBOX-Setup-Bildschirm.
Hinweis: Stellen Sie sicher, dass DGPS / RTK im CAN-Menü dem CAN-Port zugewiesen ist.
Installation mit VBOX Manager
- Geben Sie SETUP ein, wählen Sie VBOX und klicken Sie auf DGPS Mode (DGPS-Modus).
- Wählen Sie den richtigen DGPS-Modus aus den verfügbaren Optionen.
- Wählen Sie Back und dann DGPS Rate (DGPS-Rate) im Menü VBOX.
- Wählen Sie aus den verfügbaren Optionen die richtige DGPS-Baudrate aus.
- Wählen Sie Exit, um zum Hauptmenü zurückzukehren.
Einsatz mit lokaler DGPS-Basisstation
Wenn die VBOX 3i mit einer lokalen DGPS-Basisstation genutzt wird, kann die standardmäßige Genauigkeit der Positionsbestimmung (CEP-Wert 3 m 95 %) verbessert werden.
Es gibt zwei verfügbare Optionen für die Basisstation:
Genauigkeit der Positionsbestimmung 40 cm:
Wenn die VBOX 3i mit einer RTCM v2-fähigen Basisstation genutzt wird, wird die Genauigkeit der Positionsbestimmung auf 40 cm mit 95 % CEP verbessert. Die Genauigkeit der Höhenbestimmung wird auf 1 m mit 95 % CEP verbessert.
Genauigkeit der Positionsbestimmung 2 cm:
Wenn die VBOX 3i mit der Option für ein RTK-Upgrade ausgestattet ist und mit einer RLVBBS4RG oder RLVBBS5 genutzt wird, dann wird die Genauigkeit der Positionsbestimmung auf 2 cm erhöht.
- Von RACELOGIC entwickelte 2 cm Korrektur (nicht kompatibel mit VB3iDR)
- 2 cm-Korrektur mit CMR (Trimble Standardmeldungstyp)
- 2 cm-Korrektur mit RTCMv3 (RTCM Standardmeldungstyp) EMPFOHLEN
RTCM v3 wird als RTK 2-cm-Standardkorrekturtyp empfohlen. Dieses Protokoll ist weltweit anerkannt und ist unempfindlicher gegenüber Datenverlusten durch Fehler bei der Funkübertragung.
Hinweise:
- RLVB3iR2G2 hat im RTK-Modus eine maximale Abtastrate von 20 Hz.
- RLVB3iR10G10 und RLVB3iDR haben im RTK-Modus eine maximale Abtastrate von 100 Hz.
- Wenn die VBOX 3i einen Kaltstartbefehl erhält (über das Frontpanel, über Software oder über den VBOX-Manager) werden eventuelle DGPS-Einstellungen deaktiviert.
Solution Type (Lösungstyp) - Übersichtstabelle
| Solution Type (Lösungstyp) | Definition |
|---|---|
| 0 | Keine |
| 1 | Nur GNSS |
| 2 | GNSS-DGPS (inkl. RTCMv2 40 cm) |
| 3 | RTK Float |
| 4 | RTK Fixed |
| 5 | Fixierte Position |
| 6 | IMU Coast (Kalman Filter) |
0 = Keine
GNSS-Empfänger kann keine Lösung für Position berechnen.
1 = nur GNSS
Position nur über GNSS berechnet.
2 = GNSS DGPS
Position über GNSS berechnet unter Verwendung der SBAS- und DGPS-Korrekturdaten der Basisstation.
3 = RTK Float
Position wird von unter Verwendung von RTK-Korrekturdaten von GNSS berechnet. „Float“ bedeutet, dass der GNSS-Empfänger die ganzzahlige Mehrdeutigkeit berechnet. Dies hat zur Folge, dass die Positionsberechnung zu diesem Zeitpunkt kleinere Positionsfehler aufweisen wird.
4 = RTK Fixed
Position wird unter Verwendung von RTK-Korrekturdaten von GNSS berechnet. Bei einer Fixed-Lösung wird die ganzzählige Mehrdeutigkeit gesucht und gelöst. Im Anschluss können unter guten Bedingungen zentimetergenaue Positionsbestimmungen mit einer relativen Genauigkeit von weniger als 2 cm Abweichung erreicht warden.
5 = Fixierte Position
GNSS-Empfänger-Position ist fixed/gesperrt. Dies dient in erster Linie für Basisstation Empfänger.
6 = IMU Coast
Die Position wird vom Kalman-Filter berechnet, wenn das RTK-Signal verloren geht. Inertialdaten der IMU werden verwendet, um eine Lösung für die Positionsbestimmung zu bieten, bis das RTK-Signal wiederhergestellt ist.