VB3i IMU-Kalman-Filter

Einführung
VBOX 3i hat die Fähigkeit die GPS-Daten mit den Inertialdaten der IMU03 oder IMU04 in Echtzeit zu integrieren, wodurch eine genaue Filterung und Glättung der folgenden Parameter erzielt wird:
- Breitengrad
- Längengrad
- Geschwindigkeit
- Fahrtrichtung
- Höhe
- Vertikalgeschwindigkeit
Der Vorteil der VBOX 3i IMU-Integration gegenüber der Kalman-Filterung ohne IMU-Integration ist, dass der Kalman-Filter die GPS- und Inertialdaten der IMU verwendet. Dies ermöglicht dem Kalman-Filter auf die Daten der IMU zurückzugreifen, wenn die GPS-Signalqualität schlecht ist oder das Signal (für einen kurzen Zeitraum) unterbrochen wird.
Verrauchte und unterbrochene GPS-Signale
Der Kalman-Filter von RACELOGIC kann gleichzeitig GPS-Daten und Intertialdaten der IMU verwenden und ist daher in der Lage Rauschen oder Ausfälle im GPS-Signal zu kompensieren. Rechts ist eine Darstellung der Anzahl der Satelliten (blau) und der GPS-Geschwindigkeit (rot), die aufgrund der Umgebung des Fahrzeugs durch Rauschen und wiederholtes Aussetzen des Signals beeinträchtigt wird.
.png?revision=1)
Die untere Darstellung veranschaulicht den Qualitätsunterschied der Geschwindigkeitsdaten, die durch den Kalman-Filter ermittelt werden, verglichen mit den Geschwindigkeitsdaten, die allein vom GPS (rot) abgeleitet werden.
Die von dem Kalman-Filter abgeleiteten Geschwindigkeitsdaten sind trotz der ungünstigen Bedingungen sehr genau.
.png?revision=1)
Um die Genauigkeit der vom Kalman-Filter abgeleiteten Geschwindigkeit zu verdeutlichen, ist in der unteren Abbildung die vom Kalman-Filter abgeleitete Geschwindigkeit in Schwarz und die Radgeschwindigkeit in Blau dargestellt.
.png?revision=1)
Längere Ausfälle
Das untenstehende Diagramm zeigt einen vollständigen GPS-Ausfall von ca. 6,5 Sekunden.
.png?revision=1)
Beim Vergleich der vom Kalman-Filter abgeleiteten Geschwindigkeit (schwarz) mit der durchschnittlichen Radgeschwindigkeit (blau) kann man sehen, dass auch bei nicht vorhandenem GPS-Signal die nur auf IMU-Daten basierende Kalman-Schätzung sehr gut ist.
.png?revision=1)
Konfiguration der Hardware
Information zur Konfiguration der Hardware finden Sie im VBOX 3i Handbuch unter IMU-Integration.
Zuerst muss der VBOX 3i so konfiguriert werden, dass sie die Daten der IMU verwendet, mit der sie verbunden ist.
Das VBOX Kalman-Filtermodul ist so konzipiert, dass es eine standardmäßige .vbo-Datei, die unter schlechten Bedingungen (z. B. in der Nähe von Bäumen und Gebäuden) aufgezeichnet wurde, verwendet um damit eine weitere .vbo-Datei mit genaueren Geschwindigkeits- und Positionsdaten zu erzeugen.
Der Kalman-Filter kann Rohdaten verbessern, weil die Position und Geschwindigkeit in der ursprünglichen .vbo-Datei mit zwei verschiedenen Methoden gemessen werden. Die Geschwindigkeit wird mit der Dopplerverschiebung gemessen und die Position wird unter Anwendung einer normalen GPS-Triangulation gemessen. Geschwindigkeit und Position sind sehr eng verknüpft. Daher kann man die Geschwindigkeit verwenden, um die Position zu berechnen und umgekehrt. Ein weiterer Vorteil der Verwendung des Kalman-Filters in der Nachbearbeitung ist, dass der gesamte Datensatz zur Verfügung steht. Das bedeutet, dass der Filter sowohl vorwärts als auch rückwärts ausgeführt werden kann, um eine bessere Annäherung an das wahre Ergebnis zu erhalten.
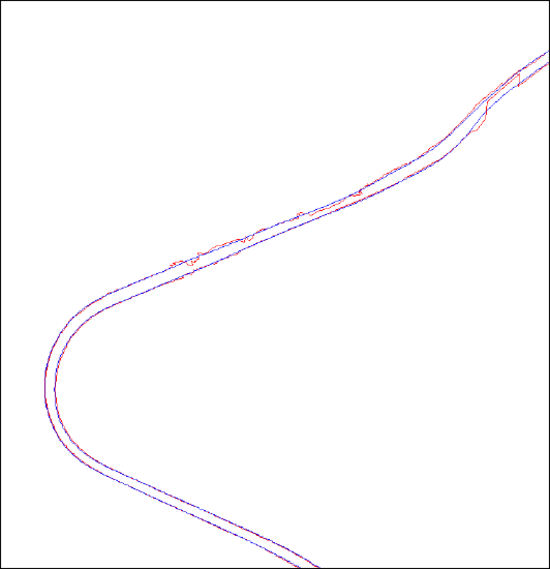
Als Beispiel für die Positionsglättung stellt die untenstehende Tabelle eine Umrisslinie auf dem Nürburgring dar. In dieser Datei haben Bäume in der Nähe der Strecke einen schlechten Satellitenempfang verursacht, was zu Rauschen und Sprüngen in den Daten führte.
Die Originaldatei wird durch die rote Linie und die Kalman gefilterte Version durch die blaue Linie dargestellt. Wie auf der blauen Linie zu sehen ist, hat der Kalman-Filter Positions- und Geschwindigkeitsdaten korreliert, um die Sprünge in den Positionsdaten zu entfernen ohne dabei einen Verlust von Daten zu verursachen, wie das bei anderen Filtermethoden oftmals der Fall ist.
|
|
|
.png?revision=1)
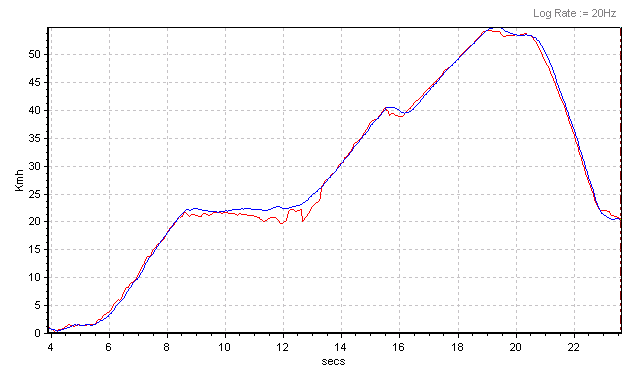
Die rechts dargestellten Geschwindigkeitsdaten zeigen die verrauschten Originaldaten in Rot und die vom Kalman-Filter geglätteten Daten in Blau an.
Hinweis: Beim Messen des Bremswegs darf der Kalman-Filter nicht verwendet warden.
Kanäle
Kovarianz
Dies ist ein Kalman-Filter Diagnosekanal, der für die RACELOGIC-Fehlersuche und für die Verbesserung des Kalman-Filters in unterschiedlichen Bedingungen verwendet wird.
POSCov_xx
POSCov_yy
POSCov_zz
VELCov_xx
VELCov_yy
VELCov_zz
T1
Dieser Kanal wird speziell zur Verfolgung der Synchronisierung zwischen IMU und VBOX verwendet.
Hinweis: Die Kanäle ‚Kovarianz‘ und ‚T1‘ werden standardmäßig in der .vbo Datei errechnet, wenn die IMU-Kalman-Filter-Integration aktiviert ist.