Integration des ABD Roboters

Notwendige Ausrüstung
- 2 x VBOX 3iD-RTK (RLVB3iDR-V3-5) von denen jede jeweils Folgendes beinhaltet:-
- VBOX 3iDR 100 HZ GPS+GLONASS RTK kompatibler Datenlogger mit Dualantennenfunktionalität (VB3iDR-V3-V5) mit Firmware v2.00b86 oder neuer
- 2 x GPS/GLONASS Antennen mit niedrigem Profil (RLACS156)
- VBOX Manager (RLVBFMAN)
- Zigarrenzünder-Stromkabel (RLCAB10L) oder 5 Ah Li-Ion-Akku (RLACS112L)
- 4-GB-Compact-Flash-Speicherkarte (RLACS098)
- USB A zu USB Mini B (RLCAB066-2)
- 2 x Inertialmesssysteme (VBIMU04)1
- 1 x Paar 2.4-GHz-Funkmodule (RLRTM24TR) inklusive:-
- 2 x VBOX Funkmodulen (RTM24)
- 2 x Antennen mit Magnetfuß (MOTOMAG24)
- 2 x 5-Wege-Lemo zu 5-Wege-Lemo (RLCAB006)
- 2 x CAN-Splitter (RLVBACS024)
- 2 x Basisstationen-Empfamgsmodule (RLTRMVARR)2 mit jeweils:-
- VBOX Empfangsfunkgerät (VBRTMVARR)
- Antenne mit Magnetfuß (KG-MAG)
- 5-Wege-Lemo zu 15-Wege-D-Buchse (RLCAB096L)
- 1 x Basiststaion-Sendefunkgerät (RLRTMVARBS)2 inklusive:-
- VBOX Sende- und Empfangsfunkgerät (VBRTMVARBS)
- Basiststationsantenne und 5-m-Kabel (RLACS142-VAR)
- 1 x DGNSS Basistation (RLVBBS4RG) inklusive:-
- DGNSS RTK Basiststation (VBBS4RG)
- GPS Antenne mit Grundplatte (RLVBACS068)3
- 2 x 5-Wege-Lemo – 9-Wege-D-Buchse (RLCAB19L)
1 Kann durch das vorhergehende IMU03-Gerät ersetzt werden
2 Kann für die 868-MHz-Basisstation (RLRTM868BS) und Empfangsfunkgeräte (RLRTM868TR) ersetzt werden
3 Die GPS-Antenne muss auf einem Stativ befestigt werden (VBBSTRIPOD2)
Schnellstart - Checkliste
- Verwenden Sie die RTK-aktivierte Doppelantenne VOX 3i, (Version 2.00 b86 oder neuer)
- Montieren Sie die die beiden GPS-Antennen und schließen Sie sie an
- Schließen Sie IMU03 oder IMU04 an
- Montieren Sie alle VBOX-Funkantennen am Fahrzeugdach
- Schließen Sie VBOX-CAN-Ausgabe an das ABD-System an
- Aktivieren Sie den VBOX CAN-Abschluss & stellen Sie die Baudrate auf 500Kb/s ein
- Wählen Sie alle erforderlichen VBOX CAN-IDs
- Aktivieren die richtigen FAS-Modi
- Stellen Sie die Kontaktpunkte für den Antennenversatz ein
- Set contact point antenna offsets.
- Stellen Sie sicher, dass die VBOXen ein RTK-DGPS-Signal empfangen und verwendet
Installation und Konfiguration
DGPS Basiststation
Um eine genaue Entfernungsberechnungen zu gewährleisten, müssen beide VBOXen so konfiguriert sein, dass sie RTK-Korrekturnachrichten von einer statischen Basisstation empfangen können. Dadurch erhöht sich die Positionsgenauigkeit der jeweiligen VBOX auf 2 cm.
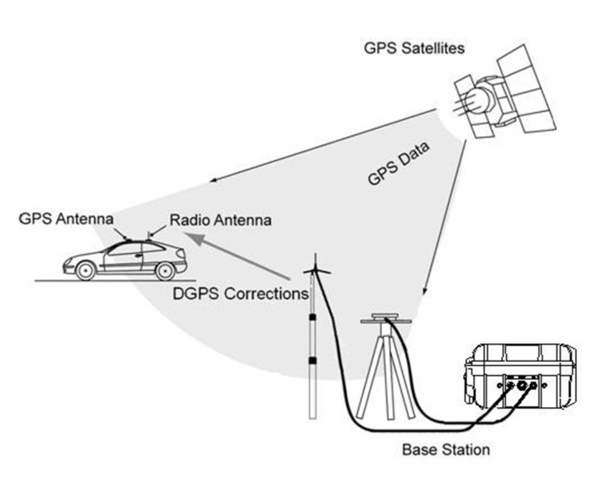
Übersicht zur Einstellung des DGPS
Einstellung der Basisstation
Stellen Sie die Basisstation, Funkantenne und GPS-Antenne in einem freien, offenen Gelände in der Nähe der Testfläche auf und schalten Sie die Basisstation an. Nach einer kurzen Initialisierungszeit, müssen folgende Einstellungen der Basisstation konfiguriert werden4:-
- DGPS Baudrate - 9600
- Handshaking - ON (An)
- DGPS-Modus - RTCM V3 (2 cm)
Sobald die Basisstation ein stabiles Satellitensignals empfängt, muss der Benutzer die Position der Basisstation definieren. Hierzu gibt es zwei Möglichkeiten. Entweder kann der Benutzer die bekannten Koordinaten manuell eingeben oder die Basisstation ermittelt automatisch eine mittlere Position über einen längeren Zeitraum von 5 Minuten, 12 Stunden oder 24 Stunden. Alternativ kann der Benutzer anstelle von SET TO AVERAGE (Durchschnittliche Position einstellen) die Option SET TO CURRENT (Aktuelle Position einstellen) wählen. Danach sollte die Anzeige die Meldung LOCATION SET OK (Position eingestellt) anzeigen und die DGPS-Korrekturmeldungen sollten jetzt an die Empfänger übertragen werden.
Weitere Erläuterung zur Einstellung der Basisstation finden Sie im Basisstation-Handbuch.
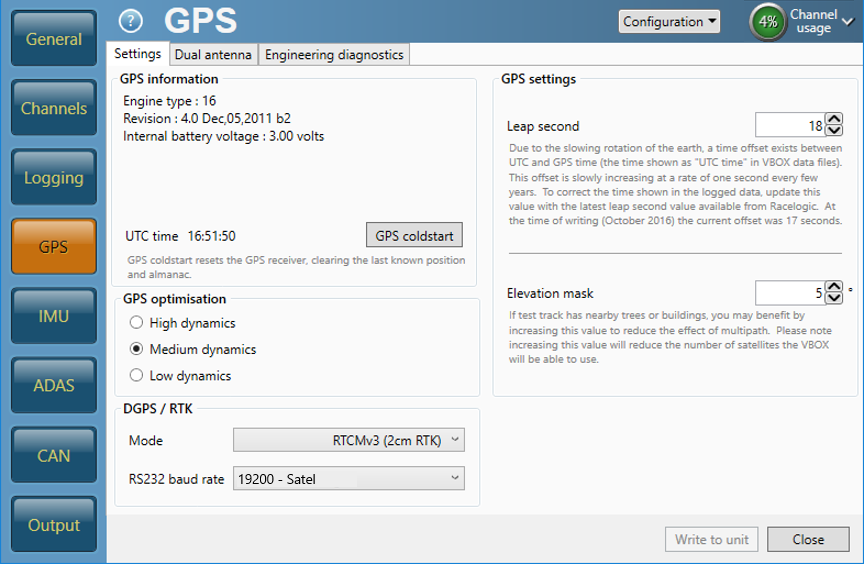
Einstellung des VBOX DGPS
Beide VBOXen müssen entsprechend konfiguriert werden, um die gesendeten Nachrichten der Basisstation empfangen zu können. Dieses Setup-Verfahren kann entweder über VBOX Tools Setup oder über den VBOX Manager durchgeführt werden. Den DGPS-Modus auf RTCMv3 (2 cm RTK) und die DGPS-Port RS232 Baudrate auf 19200 - Satel4 ein.
4 Diese Einstellungen gelten für die Verwendung der Funkpaarung RLTRMVARBS / RLTRMVARR und unterscheiden sich von den Einstellungen, die für die Funkpaarung RLRTM868BS / RLRTM868TR erforderlich sind. Eine vollständige Anleitung finden Sie im Basisstation-Handbuch.
VBOX Tools-Setup
Dies kann unter dem "GPS" Menü wie unten gezeigt erfolgen.
VBOX-Setup
Dies kann unter dem "GPS" Menü wie unten gezeigt erfolgen.
VBOX-Manager
Um den DGPS-Modus einzustellen, gehen Sie zu SETUP > VBOX > DGPS-Modus. Die DGPS-Port RS232 Baudrate kann im Menü Setup > VBOX > DGPS RS232 Rate eingestellt werden.
Installation der VBOX
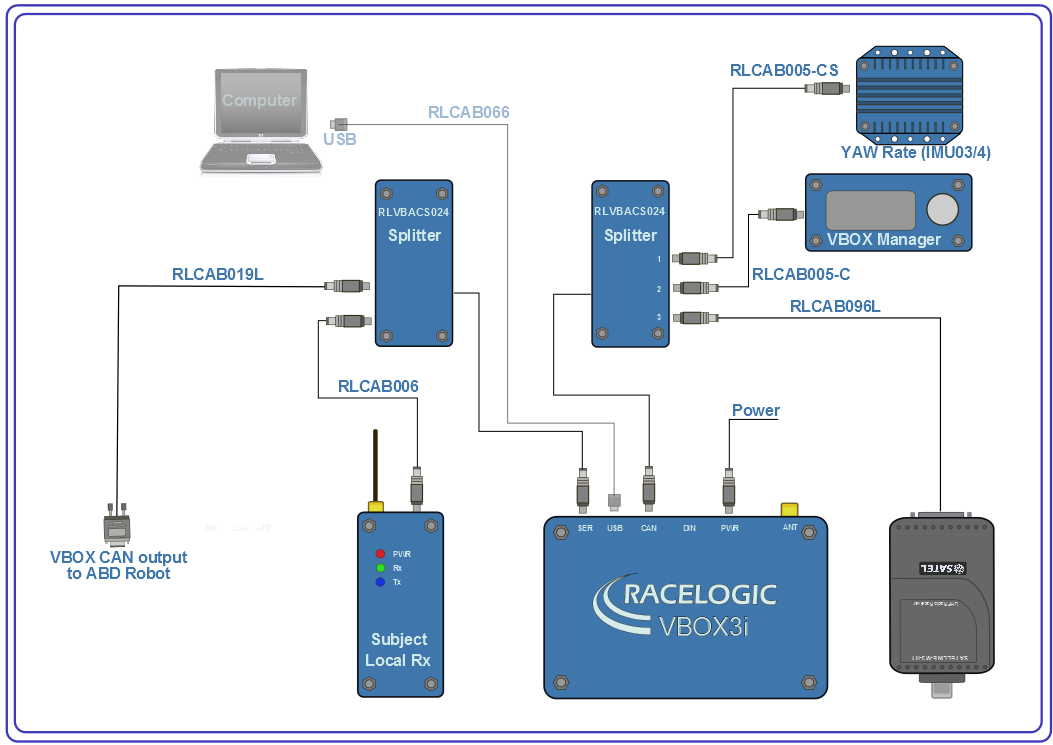
Schematic zur Installation der VBOX im Test- und Zielfahrzeug
Konfiguration der VBOX
Testfahrzeug
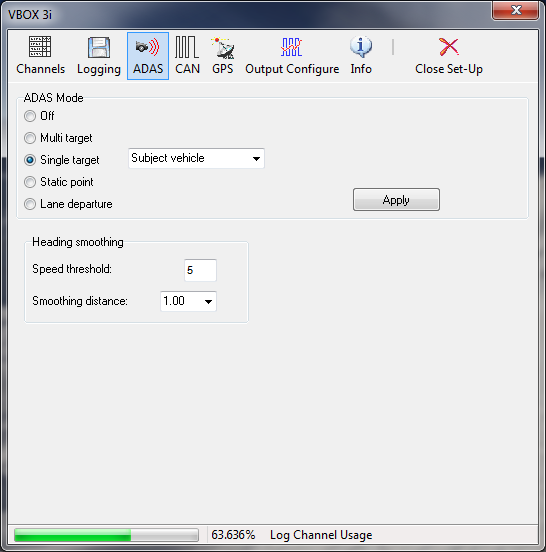
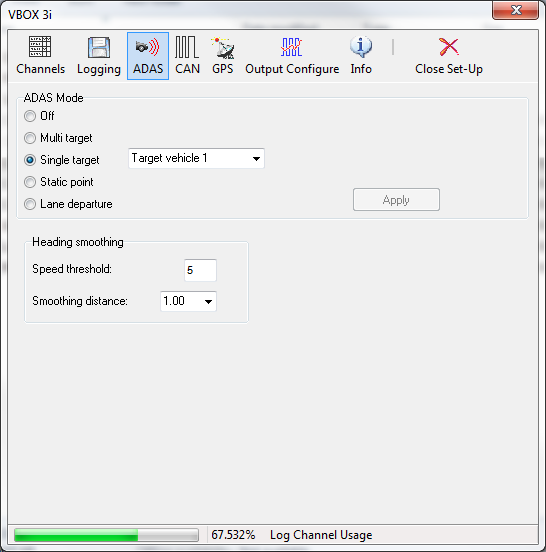
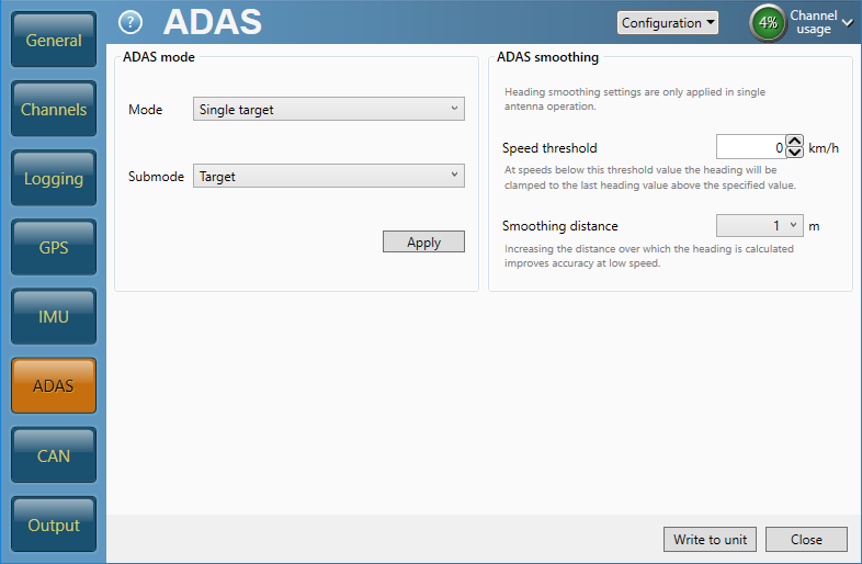
Für die Einstellung des Testfahrzeug kann entweder das VBOX Tools Setup, VBOX Setup oder der VBOX File Manager verwendet werden. Wählen Sie im Modus SINGLE TARGET (ein Zielfahrzeug) die Option SUBJECT VEHICLE (Testfahrzeug).
Die Geschwindigkeitsschwelle sollte auf 5 und der Glättungsabstand auf 1.00 eingestellt werden.
VBOX Tools-Setup
Dies kann unter dem "ADAS" Menü wie unten gezeigt erfolgen.
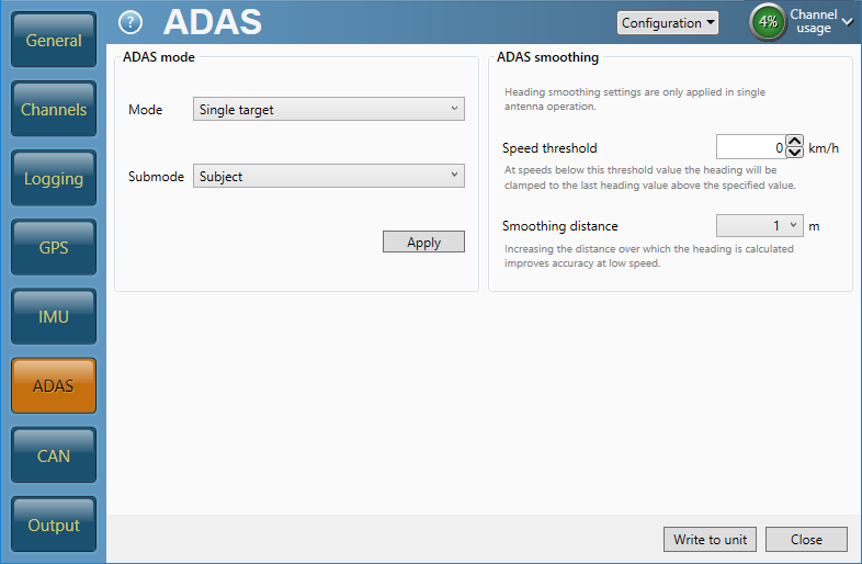
VBOX-Setup
Dies kann unter dem "ADAS" Menü wie unten gezeigt erfolgen.
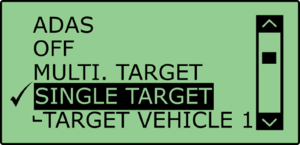
VBOX-Manager
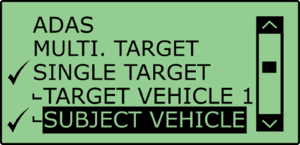
Das Testfahrzeug über SETUP > ADAS > SINGLE TARGET > SUBJECT VEHICLE eingestellt werden. Siehe untere Darstellung: -
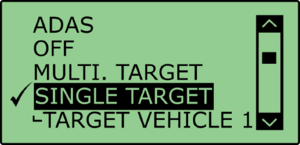 |
 |
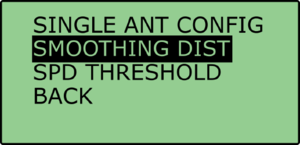
Im Menü SMOOTHING (Glättung) des Testfahrzeugs kann dann der Glättungsabstand und der Geschwindigkeitsschwellwert eingestellt werden (SETUP > ADAS > SINGLE TARGET > SUBJECT VEHICLE > SMOOTHING)
Fahrzeugversatz
Alle Entfernungsmessungen werden von Antennenpunkt zu Antennenpunkt berechnet. Da die Kontaktstellen des Fahrzeugs höchstwahrscheinlich nicht den Antennenpunkten der Fahrzeuge entsprechen, muss der Benutzer den Längs- und Querversatz für das Test- und Zielfahrzeugs eingeben.
Dies kann nur über den VBOX Manager erfolgen. Folgende Schritte müssen durchgeführt werden.
- Messen Sie sorgfältig die Längs- und Seitenabstände (in Metern) von der Mitte der Referenzantenne bis zum Frontkollisionspunkt des Testfahrzeugs und dem hinteren Kollisionspunkt des Zielfahrzeugs unter Verwendung folgender Zeichenkonvention. Dies setzt voraus, dass das Testfahrzeug immer dem Zielfahrzeug folgt.
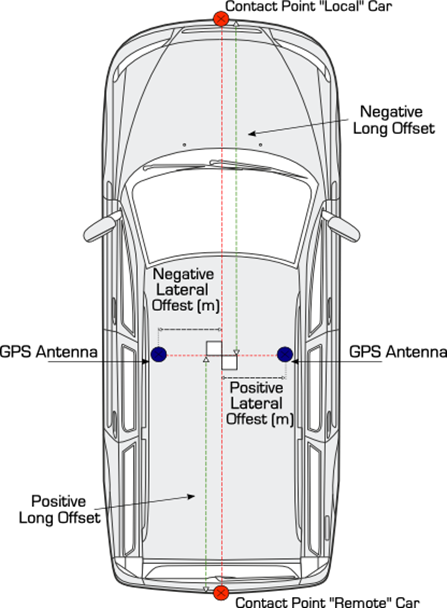
Zeichenkonvention für den Quer- und Längsversatz
- Navigieren Sie in VBOX Manager zu dem Menü OFFSET (SETUP > ADAS > SINGLE TARGET > SUBJECT VEHICLE > OFFSET MENU)
|
|
|

- Wählen Sie SUBJECT VEHICLE (Testfahrzeug) und geben Sie den Längs- und Querversatz unter LNG RANGE (Längsversatz) und LAT RANGE (Querversatz) ein.

- Wiederholen Sie diese Schritte für das Zielfahrzeug.
Zielfahrzeug
Das Zielfahrzeug muss im Menü SINGLE TARGET (ein Zielfahrzeug) als TARGET VEHICLE (Zielfahrzeug) eingestellt werden. Dazu kann entweder VBOX Tools Setup oder VBOX File Manager verwendet werden.
Der Geschwindigkeitsschwellwert sollte auf 5 und der Glättungsabstand auf 1.00 eingestellt werden.
VBOX Tools-Setup
Dies kann unter dem "ADAS" Menü wie unten gezeigt erfolgen.
VBOX-Setup
Dies kann unter dem "ADAS" Menü wie unten gezeigt erfolgen.
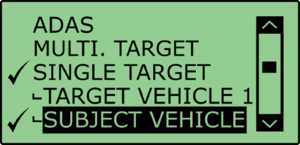
VBOX-Manager
Das Zielfahrzeug über SETUP > ADAS > SINGLE TARGET > TARGET VEHICLE 1 eingestellt werden. Siehe untere Darstellung: -
 |
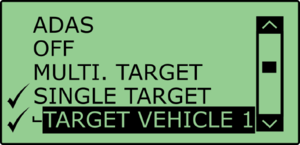 |
Dualantenne
Da der Roboter eine genaue Darstellung der Fahrtrichtung haben muss, müssen beide VBOXen im Dualantennen-Modus eingestellt werden. Folgen Sie hierzu den unten beschriebenen Schritten.
- Montieren Sie die GPS- / GLONASS-Antennen auf dem Fahrzeugdach in Fahrtrichtung, wie unten dargestellt. Schließen Sie die Primärantenne (in der Regel am hinteren Ende des Fahrzeugs positioniert) an Port A, und die sekundäre Antenne an Port B der VOX 3iDR an.

Platzierung der Dualantenne
- Beachten Sie, dass Ausrichtungsfehler im VBOX Manager unter der Option ALIGN ANTENNAS (Antennen ausrichten) auf Null gesetzt werden können.
- Messen Sie den Abstand mit einer Genauigkeit von mindestens 5 mm.
- Navigieren Sie zu dem Menü DUAL ANTENNA (Dualantenne) im VBOX Manager und stellen Sie sicher, dass der Modus DUAL ANTENNA aktiviert ist (SETUP > DUAL ANTENNA).
- Messen Sie nun den Antennenabstand und geben Sie diesen im Menü SEPARATION (SETUP > DUAL ANTENNA -> SEPARATION) ein.
CAN-Ausgabe
Um erfolgreich mit dem ABD-Roboter integriert werden zu können, müssen die CAN-Einstellungen der VBOXen in VBOX Tools Setup oder VBOX Setup korrekt eingestellt sein.
VBOX Tools-Setup
Stellen Sie zunächst sicher, dass die Option CAN TERMINATION für die CAN-Schnittstelle und die RS232-Schnittstellen ausgewählt ist. Desweiteren müssen die CAN-Busse so konfiguriert sein, dass der CAN-Anschluss der RACELOGIC-CAN-Bus und der RS232-Anschluss der Fahrzeug-CAN-Bus (VCI) ist. Siehe untere Darstellung:-
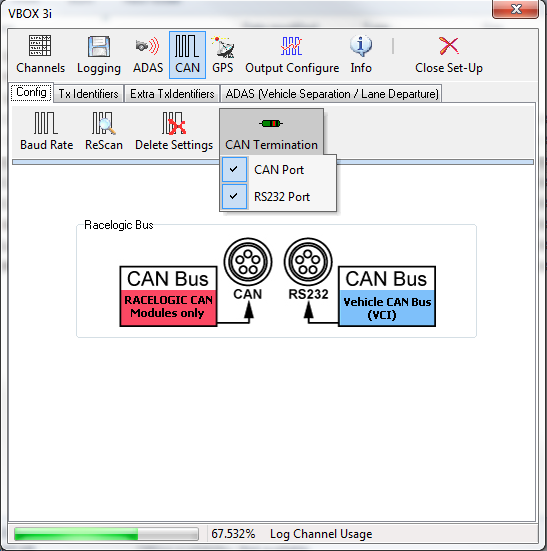
Konfiguration der CAN-Schnittstelle
Stellen Sie anschließend sicher, dass die richtigen Tx Identifiers ausgewählt sind und dass sie die richtigen IDs haben. Siehe untere Darstellung:-
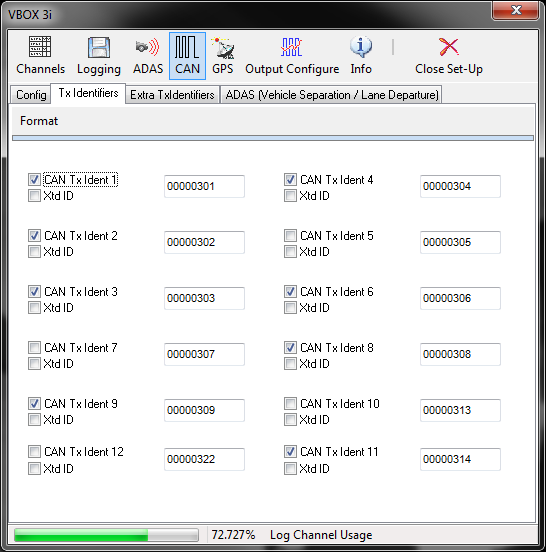
Konfiguration der Tx Identifier
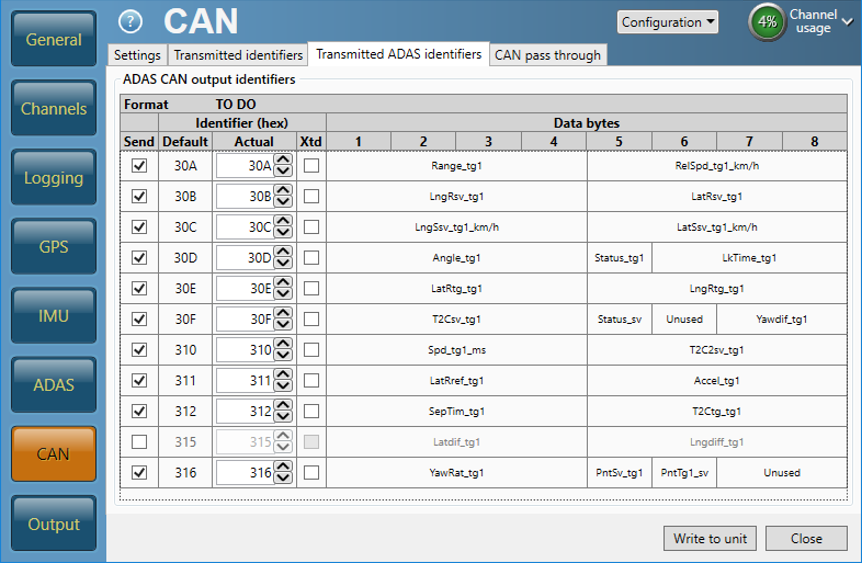
Stellen Sie anschließend sicher, dass die richtigen ADAS-/FAS-Parameter eingestellt sind und dass sie die richtigen IDs haben. Siehe untere Darstellung:-
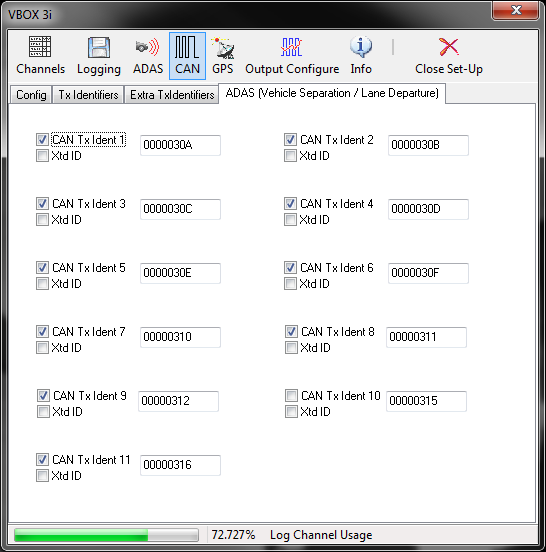
Konfiguration der ADAS-CAN-Parameter
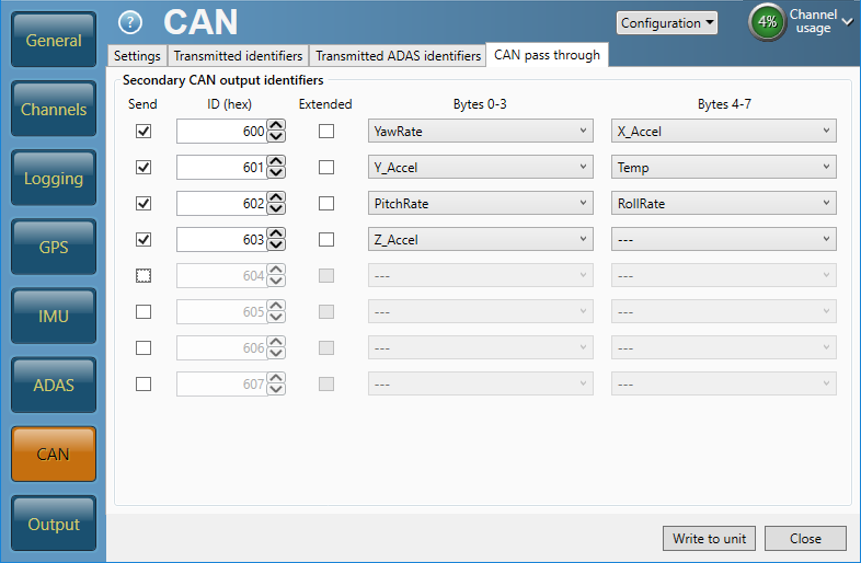
Stellen Sie abschließend sicher, dass die richtigen Tx Identifiers ausgewählt sind und dass sie die richtigen IDs haben. Siehe untere Darstellung:-
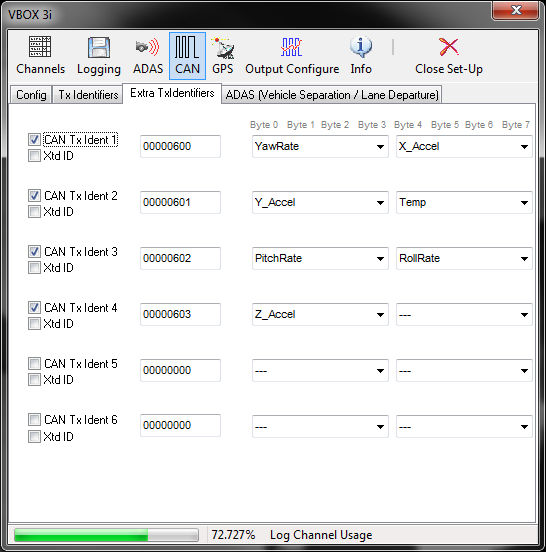
Konfiguration des IMU-CAN-Durchgangs
VBOX-Setup
Stellen Sie zunächst sicher, dass die Option CAN TERMINATION für die CAN-Schnittstelle und die RS232-Schnittstellen ausgewählt ist. Desweiteren müssen die CAN-Busse so konfiguriert sein, dass der CAN-Anschluss der RACELOGIC-CAN-Bus und der RS232-Anschluss der Fahrzeug-CAN-Bus (VCI) ist. Siehe untere Darstellung:-
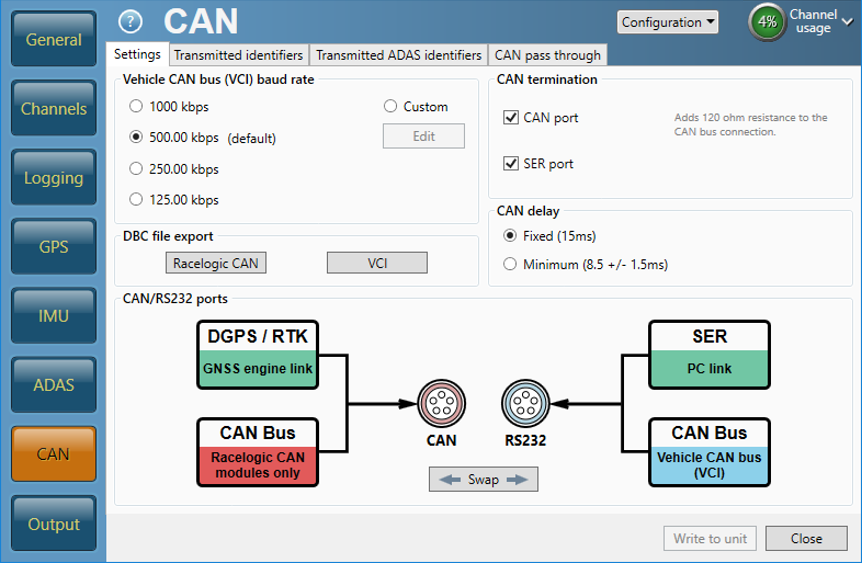
Konfiguration der CAN-Schnittstelle
Stellen Sie anschließend sicher, dass die richtigen Tx Identifiers ausgewählt sind und dass sie die richtigen IDs haben. Siehe untere Darstellung:-

Konfiguration der Tx Identifier
Stellen Sie anschließend sicher, dass die richtigen ADAS-/FAS-Parameter eingestellt sind und dass sie die richtigen IDs haben. Siehe untere Darstellung:-
Konfiguration der ADAS-CAN-Parameter
Stellen Sie abschließend sicher, dass die richtigen Tx Identifiers ausgewählt sind und dass sie die richtigen IDs haben. Siehe untere Darstellung:-
Konfiguration des IMU-CAN-Durchgangs