Konventionen für die Vorzeichenvergabe

Einführung
Von der RACELOGIC Software und Firmware verwendete Protokolle für die Vorzeichenvergabe.
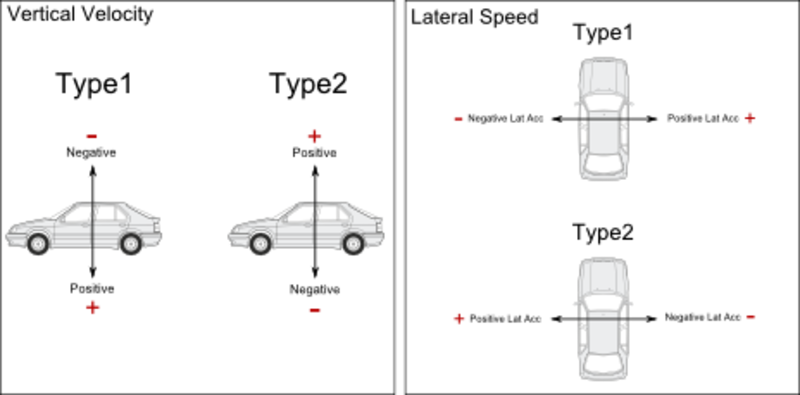
Es gibt derzeit einige Abweichungen bei den verschiedenen Einheiten. Folgende Abbildung zeigt alle Vorzeichenvergabetypen, die für die verschiedenen Kanäle genutzt werden können. Die beiden folgenden Tabellen geben an, welche Einheiten/Software derzeit mit welchen Vorzeichentypen arbeiten.
.png?revision=1)
.png?revision=1)
.png?revision=1)
.png?revision=1)
.png?revision=1)
RACELOGIC
IMU/GIERRATE
RACELOGIC verwendet für die von der IMU und von dem Gierratensensor übermittelten Beschleunigungskanäle ein rechtshändiges Koordinatensystem.
Für die Drehrichtung verwendet RACELOGIC folgende Konvention für die Vergabe des Vorzeichens:
Die Wankrate ist im Uhrzeigersinn im Verhältnis zur x-Achse positiv.
Die Nickrate ist entgegen des Uhrzeigersinns im Verhältnis zur y-Achse positiv.
Die Gierrate ist entgegen des Uhrzeigersinns im Verhältnis zur z-Achse positiv.
Weitere Produkte
| VBOX 3iSL | VBOXII SX/SL | VBOX Mini | VBOX Tools | Software Centreline | Software Brake Test | |
|---|---|---|---|---|---|---|
| Lat Acc (Querbeschleunigung) | 1 | 1 | 1 | — | — | — |
| Long Acc (Längsbeschleunigung) | 1 | 1 | 1 | — | — | — |
| Vertical Velocity (Vertikalgeschwindigkeit) | 2 | 2 | 2 | — | — | — |
| Pitch Angel (Nickwinkel) | 2 | 2 | — | 2 | — | — |
| Roll Angle (Wankwinkel) | 2 | 2 | — | 2 | — | — |
| Slip Angle (Schräglaufwinkel)YAW (GIERRATE) | 2 | 1 | 1 | 2 | — | — |
| Pitch Rate (Nickrate) | — | — | — | — | — | — |
| Roll Rate (Wankrate) | — | — | — | — | — | — |
| YAW Rate (Gierrate) | — | — | — | — | — | — |
| X Acc (X-Beschl.) | — | — | — | — | — | — |
| Y Acc (Y-Beschl.) | — | — | — | — | — | — |
| Z Acc (Z-Beschl.) | — | — | — | — | — | — |
| Centerline Dev (Mittellinienabweichung) | 2 | 2 | 2 | 2 | 2 | 2 |
ADAS
| Fahrzeugabstand | LDWS Firmware | LDWS Software | FCWS Software | |
|---|---|---|---|---|
| Zeit bis zur Kollision | 1 | — | — | 1 |
| Reichweite (Remote > Local) - Reichweite quer (Fahrz.-Abst.) /Reichweite (LDWS) |
2 | 1 | 1 | — |
| Reichweite (Remote > Local) - Reichweite längs (Fahrz.-Abst.) / Reichweite (FCWS) |
2 | — | — | 2 |
| Reichweite (Local > Remote) - Reichweite quer | 1 | — | — | — |
| Reichweite (Local > Remote) - Reichweite längs (Fahrz.- Abst.) / Geschw. (FCWS) | 1 | — | — | 1 |
| Geschwindigkeit (Remote > Local) - Geschw. quer(Fahrz.- Abst.) / Geschw. (LDWS) | 2 | 2 | 2 | — |
| Geschwindigkeit (Remote > Local) - Geschw. längs (Fahrz.- Abst.) / Geschw. (FCWS) | 2 | — | — | 2 |
| Geschwindigkeit (Local > Remote) - Geschw. quer | 2 | — | — | — |
| Geschwindigkeit (Local > Remote) - Geschw. längs (Fahrz.- Abst.) / Geschw. (FCWS) | 2 | — | — | 2 |
Branchenstandards
| Kanal | ISO | SAE |
|---|---|---|
| Lat Acc (Querbeschleunigung) | 2 | 1 |
| Long Acc (Längsbeschleunigung) | 2 | 2 |
| Vertical Velocity (Vertikalgeschwindigkeit) | 2 | 1 |
| Pitch Angel (Nickwinkel) | 1 | 2 |
| Roll Angle (Wankwinkel) | 1 | 1 |
| Schräglaufwinkel (GIERRATE) | 1 | 2 |
| Pitch Rate (Nickrate) | 1 | 2 |
| Roll Rate (Wankrate) | 1 | 1 |
| YAW Rate (Gierrate) | 1 | 2 |
| X Acc (X-Beschl.) | 2 | 2 |
| Y Acc (Y-Beschl.) | 2 | 1 |
| Z Acc (Z-Beschl.) | 2 | 1 |
Lage des Fahrzeugs
Bei der Beschreibung der Lage eines Fahrzeugs können die Bewegungen des Fahrzeugs mit Nick-, Wank- und Gierrate bzw. Schräglauf beschrieben werden.
Nickrate
.png?revision=1)
Wankrate
.png?revision=1)
Gierrate bzw. Schräglauf
.png?revision=1)
Beschleunigung – Quer und längs
Geräteeinheiten von RACELOGIC zeichnen die Beschleunigungsdaten in dem unten beschriebenen Format in der VBO-Datei auf.
.png?revision=1)
Positionsbestimmung – Breitengrad / Längengrad
RACELOGIC verwendet die Vorzeichenwerte für Positionsdaten wie im Folgenden dargestellt. Das wird zum Aufzeichnen der Daten in VBO-Dateien sowie für die von VBOX-Einheiten oder Geschwindigkeitssensoren ausgegebenen Datenströme über CAN und RS232 verwendet.
.png?revision=1)
Im folgenden Beispiel für GPS-Daten können Sie sehen, dass die erste angegebene Position „+03124.72739 +00060.78906“ ist.
Das steht für +03124.72739 West und +00060.78906 Nord. Die Angaben werden normalerweise in Minutenformat gemacht.
.png?revision=1)
Spurhalteassistent
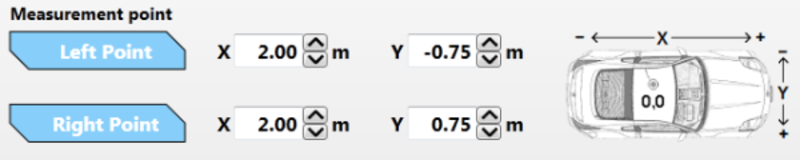
Beispiel für den Messpunktversatz
.png?revision=1)
Zur Ermittlung des Versatzes muss der Benutzer den Abstand wie im obigen Bild dargestellt zwischen dem Mittelpunkt der GPS-Antenne und dem Punkt, von dem die Ergebnisse erfasst werden sollen, vermessen. Diese werden dann in die Software eingegeben. Betrachten Sie bitte das unten gezeigte Beispiel.
.png?revision=1)
Vorzeichenzuweisung bei den Ergebnissen
Nachdem ein Ergebnis von der Software des Spurhalteassistenten in VBO-Format abgespeichert wurde, kann es in VBOX Tools analysiert werden. In der Abbildung unten wird verdeutlicht, wie die Vorzeichen den Ergebnissen je nachdem, ob sich das Fahrzeug auf der linken oder auf der rechten Seite der jeweiligen Spur befindet, zugewiesen werden.
.png?revision=1)
Abstand zur rechten Spur: Negativ, wenn die Position des rechten Messpunkts links zur rechten Spur liegt.
Abstand zur linken Spur: Positiv, wenn die Position des linken Messpunkts rechts zur linken Spur liegt.
FAS / ADAS
Zeit bis zur Kollision
Folgende Abbildung verdeutlicht die Vorzeichenzuweisung für die ADAS-Kanäle Zeit bis zur Kollision.
Das rote „X“ auf den Fahrzeugen gibt den eingestellten „Kollisionspunkt“ an. Dieser Kollisionspunkt ist standardmäßig auf den Punkt eingestellt, wo die Antenne platziert ist. Zur Änderung dieser Einstellung kann ein Versatz eingegeben werden.
.png?revision=1)
Vorzeichenvergabe für den Antennenversatz
Bei der Einstellung eines Systems für ADAS-Tests muss bei manueller Eingabe der Versatzdaten über den VBOX Manager folgende Konvention für die Vorzeichenvergabe befolgt werden.
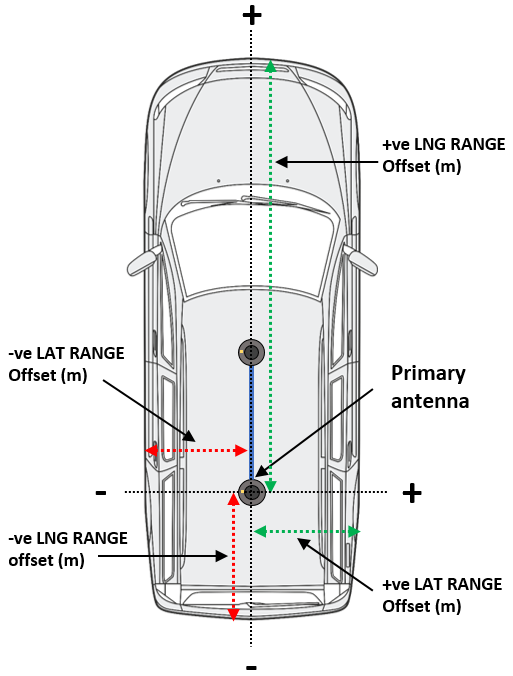
Seitlicher Versatz:
Wenn der gewünschte Kontaktpunkt links von der Antenne ist, wird das als negativer Versatz betrachtet.
Längsversatz:
Wenn sich der gewünschte Kontaktpunkt hinter der Antenne befindet, wird dieser Versatz ebenfalls als negativer Versatz betrachtet..