Definition der FAS-Parameter

Messparameter
In folgenden Tabellen ist eine Liste an Kanälen zu finden, die bei einer FAS-Messung für jedes Fahrzeug berechnet werden können.
Für Einpunkt-Fahrzeugabstandsmessungen bezieht sich RACELOGIC auf die verschiedenen Fahrzeuge als SUBJECT VEHICLE (Testfahrzeug) bzw. als TARGET VEHICLE (Zielfahrzeug). Bei Messungen für die adaptive Geschwindigkeitsregelung (ACC) zum Beispiel wird das vordere Fahrzeug als Zielfahrzeug bezeichnet, während das hintere Fahrzeug (an dem die adaptive Geschwindigkeitsregelung gemessen wird) Testfahrzeug genannt wird.
Für Messungen mit mehreren Zielfahrzeugen ändert sich die Benennung der berechneten Kanäle insofern, dass sie erkennen lässt, ob es sich auf das Zielfahrzeug 1 oder auf das Zielfahrzeug 2 bezieht.
Da in diesem Fall drei Fahrzeuge an den Messungen beteiligt sind, vergrößert dieser Test die Anzahl der Kanäle für das Testfahrzeug, was in der folgenden Tabelle zu sehen ist:
Im Zielfahrzeug werden im Grunde genommen die gleichen Abstandskanäle berechnet wie auch im Testfahrzeug. Eine Ausnahme stellen hier jedoch die gelb markierten Kanäle dar.
Die grau markierten Kanäle werden für Fixpunktmessungen nicht verwendet. Diese Kanäle werden in der Liste mit aufgeführt, um die Kontinuität der Anwendung RACELOGIC Report Generator zu gewährleisten, die nach der Kanalreihenfolge sortiert.
Definition der Kanalnamen: Wenn der Kanalname nicht selbstredend ist, besteht er aus drei Teilen.
.png?revision=1)
Der erste Teil entspricht dem Parametertyp z. B. LngR = Längsrichtung
Der zweite Teil gibt an, von welchem Fahrzeug die Fahrtrichtungsdaten für die Berechnung dieses Parameters verwendet werden z. B. sv = SUBJECT VEHICLE (Testfahrzeug)
Der letzte Teil gibt an, auf welches Fahrzeug sich die Parameterberechnung bezieht z. B. tg1 = TARGET VEHICLE 1 (Zielfahrzeug 1)
| Kanalname | Kanalbeschreibung | Einheiten | |
|---|---|---|---|
| Target 1 (Zielfahrzeug 1) | Target 2 (Zielfahrzeug 2) | ||
| Range-tg1 | Range-tg2 | Direkter Abstand zwischen Test- und Zielfahrzeug | m |
| LngRsv-tg1 | LngRsv-tg2 | Längsabstand zwischen Testfahrzeug und Zielfahrzeugen gemessen in der Fahrtrichtung des Testfahrzeugs | m |
| LatRsv-tg1 | LatRsv-tg2 | Querabstand zwischen Testfahrzeug und Zielfahrzeugen gemessen im rechten Winkel zur Fahrtrichtung des Testfahrzeugs | m |
| LngRref-tg1 | LngRref-tg2 | Die longitudinale Abweichung zwischen zwei Fahrzeugen in Bezug auf die Teststrecke* | m |
| LatRref-tg1 | LatRref-tg2 | Die Querabweichung zwischen zwei Fahrzeugen im Verhältnis zur Teststrecke* | m |
| T2Csv-tg1 | T2Csv-tg2 | Zeit bis zur Kollision mit dem Zielfahrzeug abgeleitet von den Kanälen LngRsv-tg1 und LngSsv–tg1 | Sekunden |
| T2C2sv-tg1 | T2C2sv-tg2 | Zeit bis zur Kollision mit einem abbremsenden Zielfahrzeug abgeleitet von den Kanälen LngRsv-tg1, LngSsv-tg1 und Accel-tg1** | Sekunden |
| RelSpd-tg1 | RelSpd-tg2 | Die relative Geschwindigkeit zwischen Test- und Zielfahrzeug | km/h |
| LngRtg-tg1 | LngRtg-tg2 | Längsabstand zwischen Testfahrzeug und Zielfahrzeugen gemessen in der Fahrtrichtung des Zielfahrzeugs | m |
| LatRtg-tg1 | LatRtg-tg2 | Querabstand zwischen Testfahrzeug und Zielfahrzeugen gemessen im rechten Winkel zur Fahrtrichtung des Zielfahrzeugs | m |
| Angle-tg1 | Angle-tg2 | Winkel zum Zielfahrzeug im Verhältnis zur Fahrtrichtung des Testfahrzeugs | Grad |
| Latdif-tg1 | Latdif-tg2 | Unterschied des Breitengrads zwischen Test- und Zielfahrzeug | Minuten |
| Lngdif-tg1 | Lngdif-tg2 | Unterschied des Längengrads zwischen Test- und Zielfahrzeug | Minuten |
| Spd-tg1 | Spd-tg2 | Kurs bei Bodengeschwindigkeit des Zielfahrzeugs | km/h |
| Spd-sv | – | Kurs bei Bodengeschwindigkeit des Testfahrzeugs | km/h |
| Accel-tg1 | Accel-tg2 | Über Geschwindigkeit und Zeit des Zielfahrzeugs berechnete Beschleunigung des Zielfahrzeugs | g |
| LngSsv-tg1 | LngSsv-tg2 | Die Abweichung der Geschwindigkeit zwischen dem Test- und dem Zielfahrzeug in Längsrichtung im Verhältnis zur Fahrtrichtung des Testfahrzeugs | km/h |
| LatSsv-tg1 | LatSsv-tg2 | Die Abweichung der Geschwindigkeit zwischen dem Test- und dem Zielfahrzeug in seitliche Richtung gemessen im rechten Winkel zur Fahrtrichtung des Testfahrzeugs | km/h |
| Status-tg1 | Status-tg2 | Der DGPS-Status der VBOX des Zielfahrzeugs | N/V |
| Status-sv | Status-sv | Der DGPS-Status der VBOX des Testfahrzeugs | N/V |
| LkTime-tg1 | LkTime-tg2 | Die per 2,4-GHz-Funkverbindung gesendete Rolling Time zur Angabe der Funkverbindungsqualität zwischen Fahrzeugen | N/V |
| LkTime-sv | – | Die per 2,4-GHz-Funkverbindung gesendete Rolling Time zur Angabe der Funkverbindungsqualität zwischen Fahrzeugen | N/V |
| App_Mode | App_Mode | Der aktuelle Betriebsmodus der VBOX des Testfahrzeugs**** | N/V |
| SepTim-tg1 | SepTim-tg2 | Die Zeit, die das Testfahrzeug bei Beibehaltung der aktuellen Geschwindigkeit benötigen würde, um den Fahrzeugabstand zurückzulegen | Sekunden |
| T2Ctg-tg1 | T2Ctg-tg2 | Zeit bis zur Kollision mit dem Zielfahrzeug abgeleitet von LngRtg-tg1 und der Geschwindigkeit in Längsrichtung des Zielfahrzeugs | Sekunden |
| Yawdif-tg1 | Yawdif-tg2 | Dieser Winkel entspricht der Abweichung der Fahrtrichtung des Testfahrzeugs von der des Zielfahrzeugs | Grad |
| YawRat-tg1 | YawRat-tg2 | Gierrate des Zielfahrzeugs. Dieser Wert ist nur verfügbar, wenn eine IMU an der VBOX des Zielfahrzeugs angeschlossen ist | Grad/s |
| Pntsv-tg1 | Pntsv-tg1 | Der aktuelle Kontaktpunkt im Testfahrzeug wird in den Test-zu-Zielfahrzeug-Berechnungen referenziert | N/V |
| Pnttg1-sv | Pnttg2-sv | Der aktuelle Kontaktpunkt des Zielfahrzeugs wird in den Test-zu-Zielfahrzeug Berechnungen referenziert | N/V |
*Siehe LatDif-tg1 Berechnungen
{kind=link}
**Siehe Abschnitt „Zeit bis zur Kollision“
****Siehe Abschnitt „Modus APP“
„LngRsv-tg1“, „LatRsv-tg1“
Abstand in Längs- und Querrichtung im Verhältnis zur Fahrtrichtung des Testfahrzeugs
.png?revision=1)
Definition der Parameter LONG RANGE (Längsrichtung)und LAT RANGE (Querrichtung)
HINWEIS: Die Werte von LatRsv-tg1 und LngRsv-tg1 werden auf Basis von Versatzpunkten an dem jeweiligen Fahrzeug berechnet. Genaue Informationen über die Anwendung dieser Versatzpunkte sind weiter hinten in diesem Handbuch in der Kurzanleitung zu finden (Abschnitt „Einstellungen vor dem Test").
„LngRtg-tg1“, „LatRtg-tg1“
Abstand in Längs- und Querrichtung im Verhältnis zur Fahrtrichtung des Zielfahrzeugs
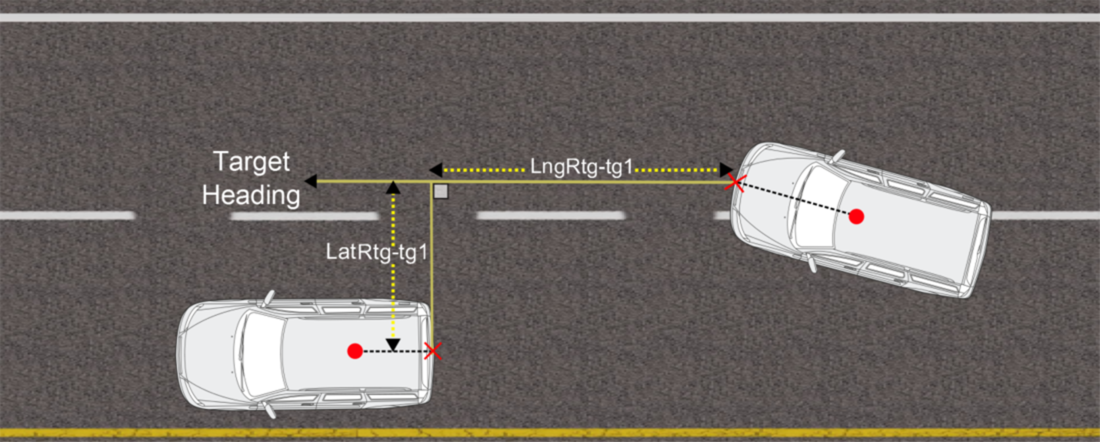
Definition der Parameter „LngRtg-tg1“ und „LatRtg-tg1“
*TARGET HEADING (Fahrtrichtung Zielfahrzeug) ist ein Kanal, der standardmäßig im Zielfahrzeug aufgezeichnet wird. Er wird jedoch nur für Berechnungen im Testfahrzeug verwendet.
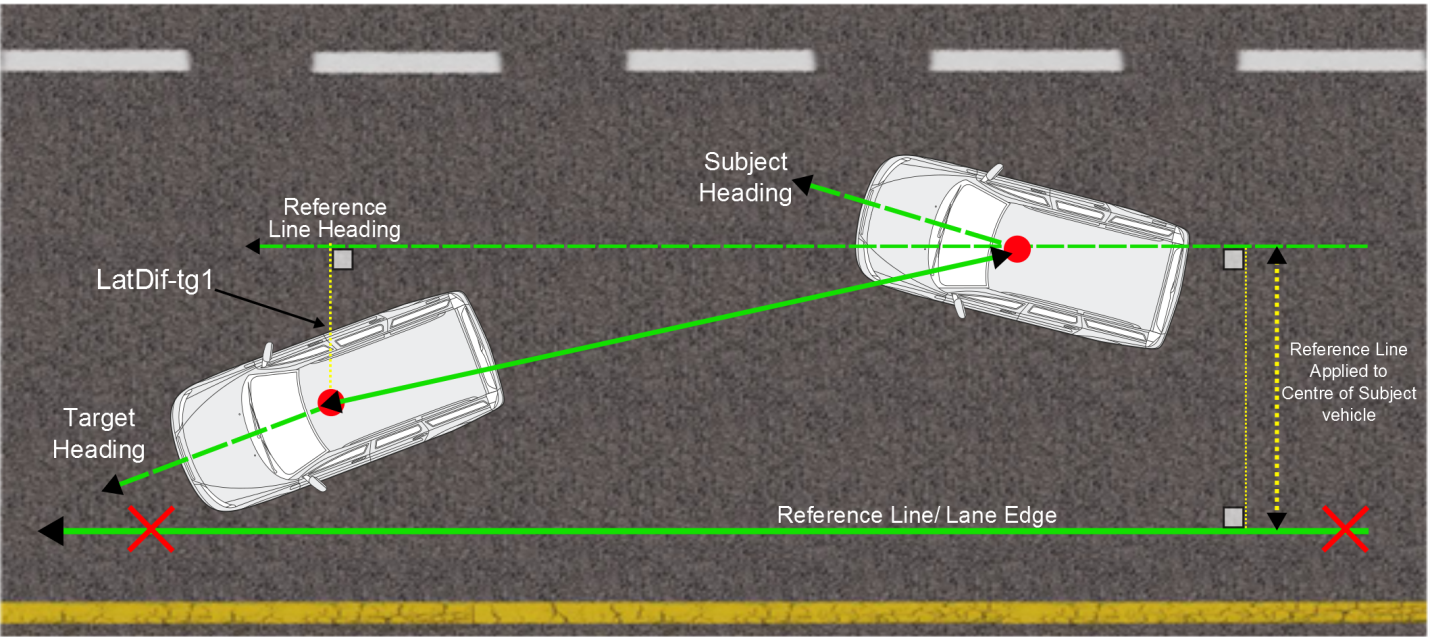
„LngRref-tg1“, „LatRref-tg1“
Längs- und Seitlicher Abstand zwischen zwei Fahrzeugen basierend auf einer externen Fahrtrichtungsreferenz.
Die „National Highway Traffic Safety Administration“ (NHTSA) fordert in ihren Vorschriften für die Betriebszulassung „Forward Collision Warning System NCAP Confirmation Test March 2012“, dass das Testfahrzeug (SV) bei den Messungen innerhalb von 0,6 m zu der Mittellinie des Zielfahrzeugs bleibt. Das Zielfahrzeug wird in dieser Norm als „Principle Other Vehicle“ oder POV (hauptsächliches anderes Fahrzeug) bezeichnet.
.jpg?revision=1)
Berechnungen von Reichweiten mit einer Referenzspur für Betriebszulassungen nach NHTSA FCWS
Wenn dieser Kanal für den seitlichen Abstand lediglich auf der Fahrtrichtung des Fahrzeugs basieren würde, wäre der daraus resultierende Wert extrem rauschanfällig. Geringfügige Schwankungen der Fahrtrichtung von Test- oder Zielfahrzeug führen zu größeren Schwankungen des seitlichen Abstands als es die NHTSA-Norm zulässt. Folgendes Beispiel illustriert das Wirkprinzip:
Schwankungen der Fahrtrichtung von 0,5 Grad über einen Fahrzeugabstand von 100 m.
.png?revision=1)
Durch Verwenden der Fahrtrichtung einer Referenzspur entsteht ein höchst stabiler Kanal für den seitlichen Abstand. Für weitere Informationen zum Aufnehmen einer Referenzspur klicken Sie bitte hier.
_(1).png?revision=1)
LatRreftg1-Berechnungen mit der Fahrtrichtung einer Referenzspur
Zeit bis zur Kollision (TTC)
T2Csv-tg1
Zeit bis zur Kollision auf Basis des Abstands in Längsrichtung von dem Testfahrzeug zum Zielfahrzeug, berechnet über die Fahrtrichtung des Testfahrzeugs und die Geschwindigkeit in Längsrichtung.
.png?revision=1)
T2C2sv-tg1
Zeit bis zur Kollision unter Berücksichtigung eines abbremsenden Zielfahrzeugs
Die NHTSA gibt folgende Gleichung zur Berücksichtigung eines abbremsenden Zielfahrzeugs in Test 2 ihrer FCWS NCAP Zulassungsprüfung vor.

- Vpov = Geschwindigkeit des Zielfahrzeugs (Zielgeschwindigkeit)
- Vcv = Geschwindigkeit des Testfahrzeugs (Geschwindigkeit)
- apov = Beschleunigung des Zielfahrzeugs (Zielbeschleunigung)
- asv = Beschleunigung des Testfahrzeugs (Beschleunigung)
- Ssv = Abstand in Längsrichtung vom Testfahrzeug zum Zielfahrzeug (LngRange)
T2Ctg-tg1
Zeit bis zur Kollision auf Basis des Abstands in Längsrichtung von dem Testfahrzeug zum Zielfahrzeug, berechnet über die Fahrtrichtung des Zielfahrzeugs und die Geschwindigkeit des Zielfahrzeugs in Längsrichtung.
.png?revision=1)
Verbindungszeit „LkTime-tg1“
Der Wert dieses Kanals nimmt entsprechend der UTC-Zeit des Zielfahrzeugs zu. Eine gute Verbindung lässt sich an einem stetig alle 10 ms zunehmenden Wert ohne Absinken auf null erkennen. Sobald dieser Wert 65535 erreicht, wird er auf null zurückgesetzt.
Die Verbindungszeit ist ein guter Indikator für die Qualität der FAS-Funkverbindung: Wenn der Inkrementalwert auf null abfällt, ist das ein Zeichen dafür, dass die FAS-Funkverbindung wahrscheinlich kurzfristig unterbrochen wurde.
Das FAS-System der VBOX erfährt normalerweise gelegentliche Ausfälle der Messwertübertragung, die hinnehmbar sind. Längere Ausfälle dagegen mit vollständigen oder intermittierenden Ausfällen sind ein Indikator für Probleme mit der Funkverbindung, die behoben werden müssen.
Weitere Informationen hierzu finden Sie im Abschnitt Funkverbindung
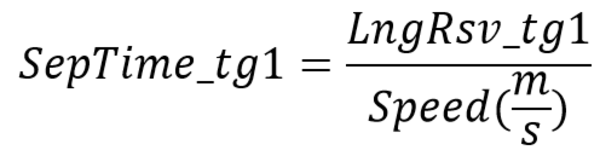
Zeitabstand; SepTim-tg1
Für die Messung der adaptiven Geschwindigkeitsregelung: Die Zeit, die das Testfahrzeug bei Beibehaltung der aktuellen Geschwindigkeit benötigen würde, um den Fahrzeugabstand zurückzulegen.
.png?revision=1)
Modus App
Dieser Kanal zeigt den aktuellen Betriebsmodus der VBOX an.
| Wert des Modus App | Beschreibung |
|---|---|
| 1 | Normal |
| 2 | Zielfahrzeug |
| 4 | Testfahrzeug |
| 8 | Statische Referenz |
| 10 | Spurhaltung - Spur 1 |
| 0x50 | Spurhaltung - Spur 2 |
| 0x90 | Spurhaltung - Spur 3 |
Messparameter des Modus LANE DEPARTURE (Spurhaltung)
Folgende Tabelle zeigt eine Liste der Kanäle, die im Testfahrzeug bei der Messung des Spurhalteassistenten aufgezeichnet werden können.
| Kanalname | Kanalbeschreibung | Einheiten |
|---|---|---|
| Range_FL | Seitlicher Abstand zur Spurlinie von dem Messpunkt vorne links am Fahrzeug | m |
| Range_FR | Seitlicher Abstand zur Spurlinie von dem Messpunkt vorne rechts am Fahrzeug | m |
| Range_RL | Seitlicher Abstand zur Spurlinie von dem Messpunkt hinten links am Fahrzeug | m |
| Range_RR | Seitlicher Abstand zur Spurlinie von dem Messpunkt hinten rechts am Fahrzeug | m |
| TTC_FL | Zeit bis zur Überschreitung der Spurlinie des Messpunkts vorne links am Fahrzeug | Sekunden |
| TTC_FR | Zeit bis zur Überschreitung der Spurlinie des Messpunkts vorne rechts am Fahrzeug | Sekunden |
| TTC-RL | Zeit bis zur Überschreitung der Spurlinie des Messpunkts hinten links am Fahrzeug | Sekunden |
| TTC_RR | Zeit bis zur Überschreitung der Spurlinie des Messpunkts hinten rechts am Fahrzeug | Sekunden |
| LatSpd_FL | Seitliche Geschwindigkeit zur Spurlinie im Verhältnis zum Messpunkt vorne links am Fahrzeug | km/h |
| LatSpd_RR | Seitliche Geschwindigkeit zur Spurlinie im Verhältnis zum Messpunkt hinten rechts am Fahrzeug | km/h |
| LatSpd_RL | Seitliche Geschwindigkeit zur Spurlinie im Verhältnis zum Messpunkt hinten links am Fahrzeug | km/h |
| LatSpd-FR | Seitliche Geschwindigkeit zur Spurlinie im Verhältnis zum Messpunkt vorne rechts am Fahrzeug | km/h |
| Angle (Winkel) | Der Winkel zwischen der Fahrtrichtung des Fahrzeugs und der Tangente der Referenzspur an dem Punkt, wo der Bereich berechnet wird | Grad |
Einige Parameter aus der obigen Tabelle werden auf den folgenden Seiten durch Zeichnungen erläutert, um klar und deutlich darzustellen, wie sie berechnet werden.
Berechnung Range_Lt
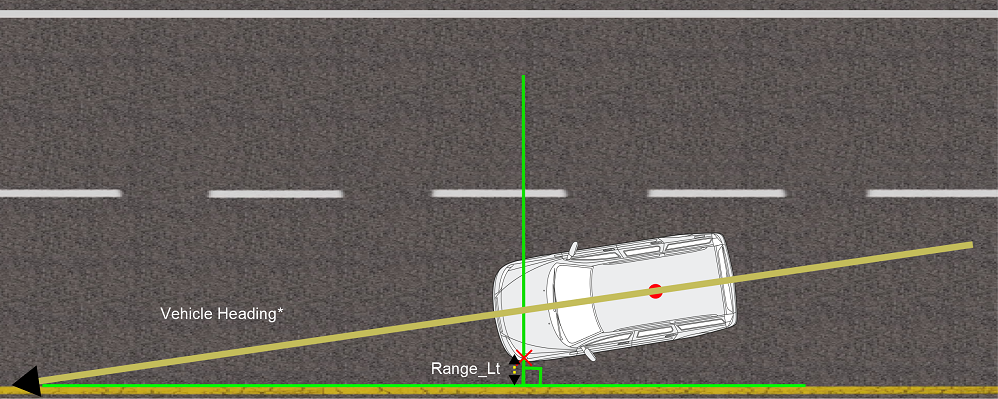
Parameterberechnung Range_Lt
Der Wert für Range_Lt ist der kürzeste senkrechte Abstand zwischen dem Versatzpunkt und der gemessenen Spur.
LatSpd-Lt
Seitliche Geschwindigkeit des linksseitigen Versatzpunkts im Verhältnis zum markierten Fahrspurrand.
LatSpd-Lt = Vfwd * sin(α)
Vfwd = GPS-Geschwindigkeit (Kurs bei Bodengeschwindigkeit)
α = Richtung des Fahrspurrands – Fahrtrichtung am Versatzpunkt des Fahrzeugs.
Berechnung Range_Rt
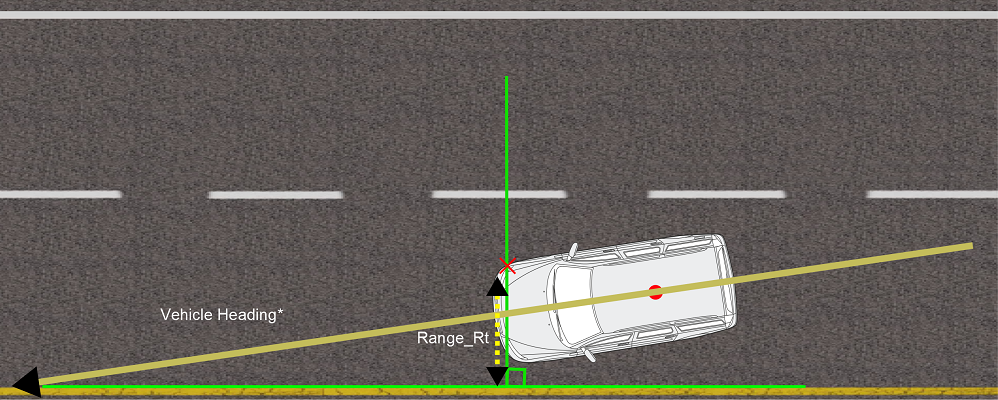
Parameterberechnung Range_Rt
Der Wert für Range_Rt ist der kürzeste senkrechte Abstand zwischen dem Versatzpunkt und der gemessenen Spur.
LatSpd-Rt
Seitliche Geschwindigkeit des rechtsseitigen Versatzpunkts im Verhältnis zum markierten Fahrspurrand.
LatSpd-Rt = Vfwd * sin(α)
Vfwd = GPS-Geschwindigkeit (Kurs bei Bodengeschwindigkeit)
α = Richtung des Fahrspurrands – Fahrtrichtung am Versatzpunkt des Fahrzeugs.
Winkelberechnung
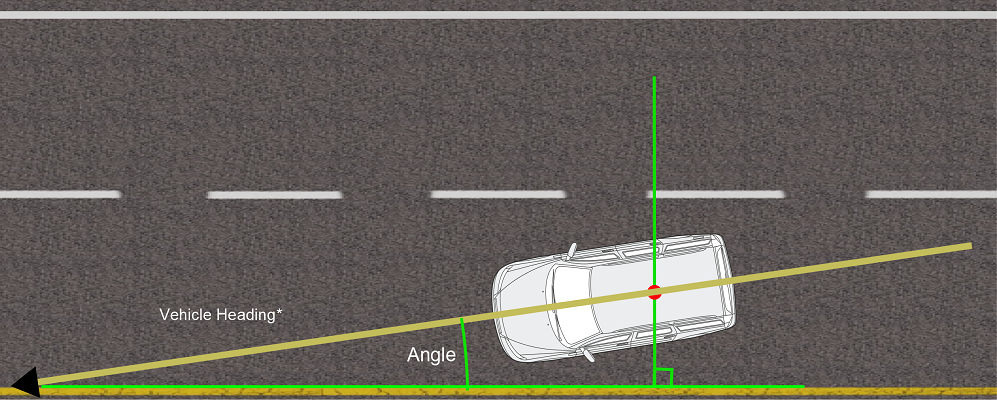
Parameterberechnung des Winkels
Der Wert des Winkels entspricht dem Winkel zwischen der Fahrtrichtung des Fahrzeugs und der Tangente der gemessenen Fahrspur am kürzesten senkrechten Abstand zu der GPS-Antenne.
TTC-FL; TTC-FR; TTC-RL; TTC-RR
Zeit bis zur Überquerung der Referenzfahrspur berechnet über die seitliche Geschwindigkeit an den Versatzpunkten vorne links, vorne rechts, hinten rechts bzw. hinten links
z. B. TTC-FR = Range_FR (in Metern)/LatSpd_FR (m/s)
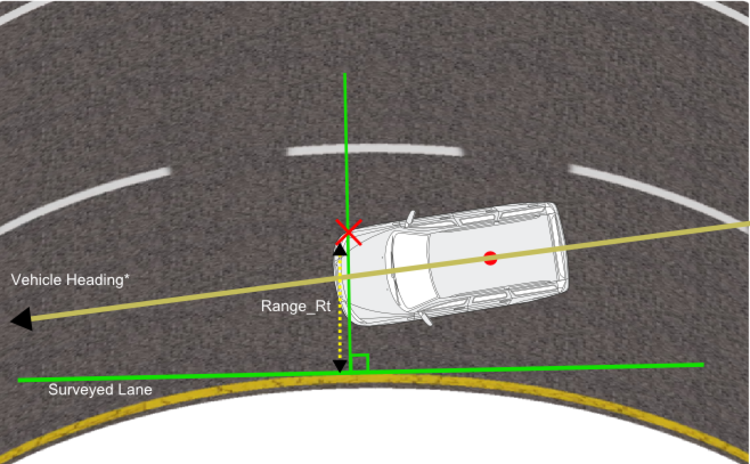
Berechnung der Spurhaltung bei Kurvenfahrt
Wenn ein Spurhalteassistent auf einer kurvigen Fahrspur geprüft wird, nimmt die Firmware der VBOX wie unten dargestellt Messungen von der Eckposition zu der nächsten senkrechten Tangenten zum kurvigen Fahrspurrand vor.
.png?revision=1)
Bestimmung des Abstands zu einer kurvigen Fahrspurkante
Multi Static Point (Statischer Mehrpunkt)
Die folgende Tabelle bietet eine Liste mit Kanälen, die während eines Multi Static Tests im Testfahrzeug aufgezeichnet werden können.
| Kanalname | Beschreibung | Einheit |
|---|---|---|
| ID (1-5) | Die Bezifferung der Merkmale, die derzeit unter ID 1/2/3/4/5 gespeichert sind. | N/V |
| Range (1-5) | Der direkte Abstand zwischen dem Messpunkt und dem Merkmal in ID 1/2/3/4/5 | m |
| Lat_Range (1-5) | Die Querdistanz zwischen dem Messpunkt und dem Merkmal in ID 1/2/3/4/5, im rechten Winkel zur Fahrtrichtung des Testfahrzeugs gemessen | m |
| Lng_Range (1-5) | Die Längsdistanz zwischen dem Messpunkt und dem Merkmal in ID 1/2/3/4/5, in Fahrtrichtung des Testfahrzeugs gemessen | m |
| Angle (1-5) | Der Winkel zum Merkmal in ID 1/2/3/4/5, in Bezug auf die Fahrtrichtung des Testfahrzeugs | Grad |