Vorteile der IMU- und Kalman-Filter-Integration für die Schräglaufwinkelmessung

Was ist Schräglaufwinkel?
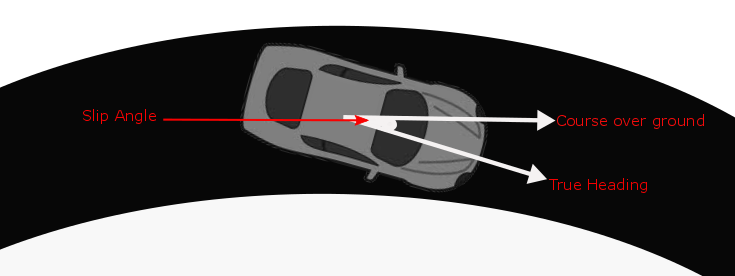
Der Schräglaufwinkel der VBOX3iD/VBOX3iDR ist der Unterschied zwischen den Kanälen der Fahrtrichtung des Fahrzeugs (Kurs über dem Erdboden gemessen von der primären GPS-/GNSS-Antenne) und der Drehrichtung des Rades (von der GPS-/GNSS-Doppelantenne gemessen). Dies wird auch als tatsächliche Fahrrichtung (True Heading) bezeichnet.
Der Schräglaufwinkel und der versetzte Schräglaufwinkel werden von diesen beiden Komponenten, die von der GPS-/GNSS-Antenne abgeleitet werden, berechnet.
Fahrtrichtung
Wenn der IMU-Kalman-Filter aktiviert ist, wird die Fahrzeugrichtung von dem Kalman-Filter gefiltert, um mit Hilfe der Hebelarm-Korrektur eine genauere Fahrtrichtung angeben zu können. Dies wird deutlich, wenn man die Fahrtrichtung (Heading) mit der ungefilterten Fahrtrichtung (Raw Heading) vergleicht. Dieser genauere Fahrtrichtungsparameter wird dann verwendet, um den Schräglaufwinkel und den versetzten Schräglaufwinkel zu berechnen.
Tatsächliche Fahrtrichtung
Der Kanal für die tatsächliche Fahrtrichtung (True Heading) wird nicht durch den Kalman-Filter verarbeitet. Wenn die IMU jedoch angeschlossen ist, verwendet die VBOX 3i Dual-Antenne (VB3iD/VB3iDR) die Gierrate der IMU für Berechnungen des versetzten Schräglaufwinkels. Die Gierrate der IMU hat ein geringeres Rauschen als die der VB3iD/VB3iDR, wodurch bessere Parameter für Berechnung des versetzten Schräglaufwinkels erreicht werden. Bitte beachten Sie, dass sich dies nicht auf den normalen Schräglaufwinkel-Kanal auswirkt, da für dessen Berechnung keine Gierrate erforderlich ist. Beachten Sie auch, dass der Kalman-Filter nicht aktiviert sein muss, um diesen zusätzlichen Vorteil zu erhalten.
Schlussfolgerung
Die Fahrtrichtung wird durch den Kalman-Filter errechnet und der versetzte Schräglaufwinkel durch die IMU-Anbindung unterstützt. Dadurch werden genauere und Hebelarm-korrigierte Parameter für den Schräglaufwinkel und versetzten Schräglaufwinkel erreicht. Aus diesem Grund empfehlen wir die Verwendung eines IMU-Kalman-Filters für Schräglaufwinkelmessungen.
Hinweis: Wenn True Heading ausfällt, werden keine Gleitwinkelberechnungen durchgeführt.