12-2 - VBOX 3i IMU-Integration - Dachmontage

Mit Hilfe der IMU-Dachhalterung hat der Anwender die Möglichkeit, die Daten vom Dach auf einen beliebigen Punkt am Fahrzeug zu übertragen. Bei Verwendung der Dachmontageoption wird standardmäßig ein Z-Versatz von 1 m hinzugefügt.
Sollten die Daten des Kalman-Filters für eine alternative oder genauere Position am Fahrzeug erforderlich sein, sollten Messungen von der Mitte der IMU zu der gewünschten Stelle vorgenommen werden. Da sich die IMU in einem Gehäuse befindet, ist es nicht einfach, genaue Messungen durchzuführen. Die Messung der Z-Achse kann von der Mitte der GPS-Antenne ausgeführt werden, vorausgesetzt, dass 3 cm von der physikalischen Messung subtrahiert werden. Die Übersetzungsmessungen müssen auf allen 3 Achsen (X, Y und Z) durchgeführt werden.
Erforderliche Ausrüstung
| IMU04 |
|---|
| VBOX 3i (IMU04-kompatibel) |
| IMU04 |
| VBOX-Tools oder VBOX-Setup |
| RLCAB119 VBOX – IMU-Verbindungskabel |
| RLCAB001 / RLCAB066-2 – VBOX 3i PC-Verbindungskabel |
| VBOX Manager (optional) |
Setup
Hardware
Wichtiger Hinweis: Die IMU04 muss vor dem Einschalten mit der VB3i verbunden sein, um sicherzustellen, dass alle Daten korrekt synchronisiert werden können.
- Installieren Sie die VBOX 3i im Testfahrzeug und montieren Sie die IMU-Dachhalterung auf dem Fahrzeugdach.
- Verbinden Sie die Antenne der IMU-Dachhalterung mit der Primärantenne der VB3i (Antenne A).
- Verbinden Sie über das RLCAB119-Kabel den linken Port der IMU (CAN/KF-Port) mit dem analogen V3-V5 25W D-Eingangsport der VBOX 3i.
- Führen Sie die Messungen für die Datenübersetzung auf der X,-, Y- und Z-Achse von der Mitte der IMU aus. Standard ist 1 m unterhalb der IMU.
- Schalten Sie die VBOX 3i nach Anschließen der IMU ein.
- Aktivieren Sie nun die IMU-Integration entweder mit dem VBOX-Manager oder über VBOX-Tools – VBOX-Setup oder VBOX-Setup.

VBOX 3i-V3-V5 and IMU04
VBOX-Tools
- Vergewissern Sie sich, dass das Gerät IMU03 bzw. 04 angeschlossen und die VBOX 3i eingeschaltet ist.
- Schließen Sie die VBOX 3i über das Kabel RLCAB001 oder RLCAB066-2 (RS232 oder USB) an den PC an.
- Öffnen Sie VBOX-Tools, und schließen Sie die VBOX 3i durch Auswahl des COM-Ports (Optionen der Toolbar) an.
- Starten Sie das VBOX-Setup.
- Wählen Sie "High Dynanmics" GPS-Optimisierung und eine Datenaufzeichnungsrate von 100 Hz (Logging Tab).
- Aktivieren Sie die Option "Use IMU" (IMU verwenden). Sobald VBOX Tools die erste Freigabe abgeschlossen hat, klicken Sie bitte die Schalftfläche "Roof mount" (Dachmontage).
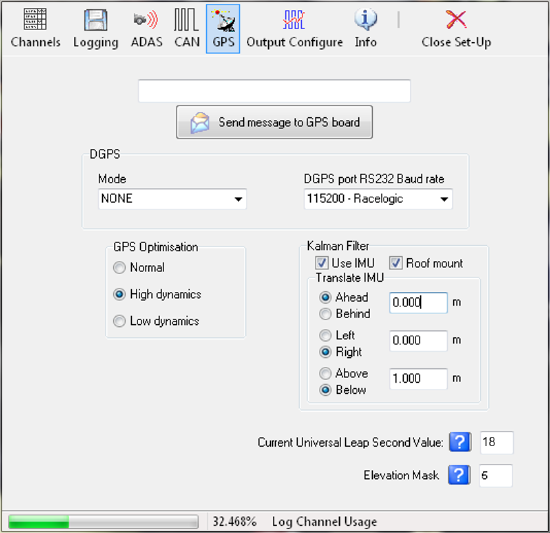
- Geben Sie die gemessenen Entfernungen von der IMU zum Übersetzungspunkt ein.
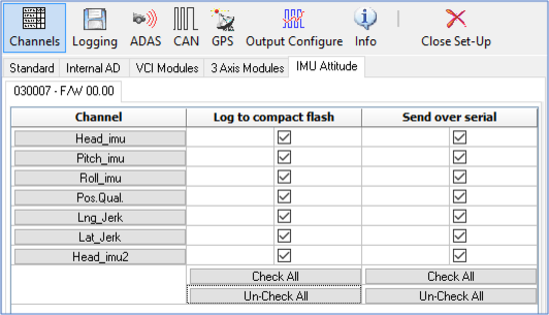
- Die Kanäle unter IMU Attitude (Head_imu, Pitch_imu, Roll_imu, Pos.Qual., Lng_Jerk, Lat_Jerk und Head_imu2) automatisch auf Aufzeichnen (Log to compact flash) gestellt. Wenn "IMU Attitude" als serielle Livedaten angezeigt werden soll, muss der Benutzer die Kanäle unter Send over serial mit einem Häkchen versehen.
- Führen Sie vor Beginn der Messung das Verfahren zur Initialisierung und zur vollständigen Kalibrierung durch.
VBOX-Setup
- Stellen Sie sicher, dass die IMU04 über das RLCAB119 angeschlossen und die VBOX 3i eingeschalten ist.
- Schließen Sie die VBOX 3i über das Kabel RLCAB001 oder RLCAB066-2 (RS232 oder USB) an den PC an.
- Starten Sie das VBOX Setup und stellen Sie eine Verbindung mit der VBOX 3i her, indem Sie COM-Port auswählen..
- Wählen Sie das Menü "GPS" und gehen Sie zu "Settings" (Einstellungen). Stellen Sie sicher, dass "GPS Optimisation" (GPS-Optimierung) auf "High dynamics" eingestellt ist.
- Wählen Sie die Menüoption "Logging" (Aufzeichnen) und stellen Sie sicher, dass die Datenaufzeichnungsrate (Log rate) auf "100 Hz" eingestellt ist.
- Wählen Sie die Menüoption "IMU" und klicken Sie auf "Enable IMU kalman filter" (IMU-Kalman-Filter aktivieren). Sobald VBOX Setup die erste Freigabe abgeschlossen hat, klicken Sie bitte das Feld "Roof mount" (Dachmontage).


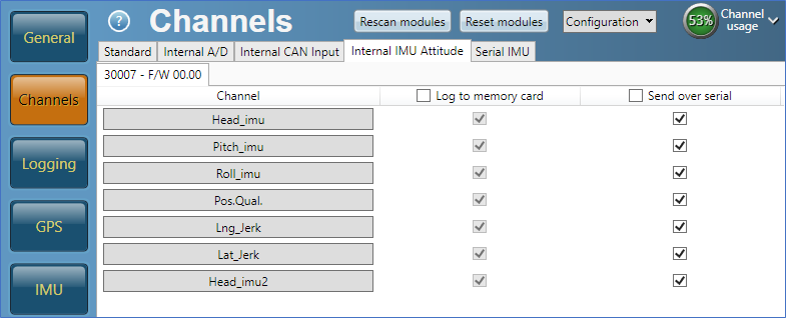
- Die Kanäle unter Internal IMU Attitude ( Head_imu, Pitch_imu, Roll_imu, Pos.Qual., Lng_Jerk, Lat_Jerk und Head_imu2) automatisch auf Aufzeichnen (Log to compact flash) gestellt. Wenn "IMU Attitude" als serielle Livedaten angezeigt werden soll, muss der Benutzer die Kanäle unter "Send over serial" mit einem Häkchen versehen.
- Die Kanäle unter Serial IMU (x accel, y accel, z accel, temp, pitch rate, roll rate und yaw rate) automatisch auf Aufzeichnen (Log to compact flash) gestellt. Wenn "Serial IMU" als serielle Livedaten angezeigt werden soll, muss der Benutzer die Kanäle unter "Send over serial" mit einem Häkchen versehen.
- Wählen Sie "Write to unit" (Auf Gerät übertragen), um die Einstellungen auf die VB3i zu übertragen.
- Führen Sie vor Beginn der Messung das Verfahren zur Initialisierung und zur vollständigen Kalibrierung durch.
VBOX-Manager
- Stellen Sie sicher, dass die IMU04 über das RLCAB119 angeschlossen und die VBOX 3i eingeschalten ist.
- Verbinden Sie den VBOX Manager mit der VBOX.
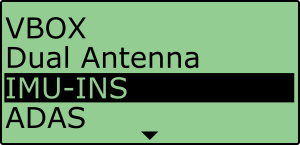
- Rufen Sie das SETUP-Menü von VBOX Manager auf.
- Wählen Sie „IMU-INS“, und klicken Sie dann auf „ENABLE IMU“.
 |
 |
- Blättern Sie zu „Enable“ (Aktivieren) und wählen Sie. Sobald der Bestätigungsbildschirm „OK“ gelöscht wurde, wird „Enabled“ (Aktiviert) angezeigt.
|
|
|
- Blättern Sie zum Menü „Roof Mount“ und wählen Sie.
- Wählen Sie „Enable“ (Aktivieren). Sobald der Bestätigungsbildschirm „OK" gelöscht wurde, wird „Enabled“ (Aktiviert)angezeigt.
 |
 |
- Wählen Sie bei Bedarf „Ant to Ref. Offset" und geben Sie die Entfernungen ein, um die IMU-Position an einen anderen Punkt im Fahrzeug zu übertragen.. Weitere Informationen hierzu finden Sie hier.
|
|
|
- Interne IMU-Neigungskanäle (Head_imu, Pitch_imu, Roll_imu, Pos.Qual., Lng_Jerk, Lat_Jerk und Head_imu2) werden automatisch auf Protokoll gesetzt. Wenn IMU Neigungsdaten live angezeigt werden sollen (mit VBOX Test Suite), muss der Benutzer die VBOX-Setup-Software aufrufen und die Kanäle als 'Send over serial' markieren.
- Führen Sie vor Beginn der Messung das Verfahren zur Initialisierung und zur vollständigen Kalibrierung durch.
- Wenn die IMU nicht auf einer ebenen Fläche montiert ist, führen Sie die Kalibrierung unter „Pitch/Roll Offset" durch.
Das setzt die Kanäle Pitch_imu und Roll_imu zurück. Nach Abschluss der IMU-Kalmanfilter-Kalibrierung muss eine Winkelversatzkalibrierung bei auf ebenem Untergrund stillstehendem Fahrzeug durchgeführt werden.
 |
 |
- Wenn Sie einen FAS-Test durchführen, vergewissern Sie sich, dass im Menü „ADAS Mode“ „Enabled“ (Aktiviert) angezeigt wird.
Diese Option ändert die Rate mit welcher der Kalman-Filter eine GPS-Positionsprobe nimmt, um die Positionsbestimmung des Filters zu verbessern. Während dies vorteilhaft für FAS-Tests ist, verringert es leicht die Genauigkeit der gefilterten Geschwindigkeit und sollte somit nicht für geschwindigkeitsbasierte Tests, wie z. B. Bremstests ausgewählt werden.
Achtung: Nicht möglich mit IMU03.
Wichtige Hinweise
- Für die IMU04-Integration muss die Modellversion VBOX 3i-V3,V4 oder V5 verwendet werden. Das sind für IMU04 aktivierte VBOX 3i-Geräte.
- Die IMU04 kann nicht mit IMU-Integration verwendet werden, wenn sie über die CAN-Verbindung (RLCAB120 / RLCAB005-CS) an die VBOX angeschlossen ist. Mit dieser Methode können nur Standard-IMU-Kanäle aufgezeichnet werden. Weitere Informationen hierzu finden Sie in dem Abschnitt IMU als CAN-Modul nutzen.
- Die IMU04-Standardkanäle können auch ohne IMU-Integration zu aktivieren aufgezeichnet werden, wenn die IMU04-Einheit mit dem RLCAB119-Kabel über den KF-Port angeschlossen ist.
- Die IMU04 muss in einem RACELOGIC CAN-Modus betrieben werden, um für den IMU-Kalman-Filter verwendet zu werden.
- NB FAS/ADAS - Wenn der IMU-Filter im FAS-/ADAS-Modus verwendet wird, müssen die GPS-Antenne und die IMU (bei Dachmontage) zusammen positioniert oder aber ohne relativen X- oder Y-Versatz angeordnet werden. Sollte eine Abweichung vorliegen, sollten die manuellen Kontaktpunkte auf die Position der IMU und nicht auf die der GPS-Antenne verweisen.
- NB FAS/ADAS - Bei Verwendung des IMU-Filters kann der Benutzer die SET-POINTS-Funktion nicht zur Festlegung von Kontaktpunkten in Einpunkt- oder Mehrpunkt-ADAS-Modi verwenden.
Initialisierung
Bei Nutzung der IMU-Integration ist eine Initialisierungsphase erforderlich, wenn die IMU erstmalig erst nach Einrichtung an die VBOX angeschlossen wird. Diese Phase läuft automatisch an, nachdem die VBOX eine Satellitenpositionsbestimmung durchführen konnte. Wenn die IMU-LED auf der Vorderseite der VBOX 3i grün blinkt, ist die Initialisierung abgeschlossen. Hinweis: Wenn Sie eine VB3i-V1 nutzen, die nicht mit einer IMU-LED ausgestattet ist, lesen Sie für weitere Informationen über die LED-Anzeige in dem folgenden Abschnitt über die LED-Anzeige.
LED-Anzeigen bei VBOX 3i (V2/V3/V4/V5) und IMU04
| VBOX 3i LED Farbe | Beschreibung |
|---|---|
| Leuchtet orange | IMU aktiviert, keine IMU angeschlossen. |
| Blinkt orange | SAT-Anbindung OK. 30-sekündiger Initialisierungsprozess im Stillstand läuft. Wenn das Fahrzeug bewegt wird, blinkt die LED solange, bis der 30-sekündige Stillstand abgeschlossen ist. |
| Blinkt grün | Initialisierung abgeschlossen – es wurde noch keine Fahrtbewegung erkannt. |
| Leuchtet grün | Eine Fahrtbewegung wurde erfasst und die IMU-Integration funktioniert einwandfrei. |
| IMU04 LED Farbe | Strom | Kommunikation |
|---|---|---|
| Rot | Anfängliche Hochfahrphase | Keine Kommunikation |
| Orange | Temperaturprüfungen. Wenn die Temperatur außerhalb des Betriebsbereichs ist, bleibt die LED orange. | IMU-Integration wird genutzt, Daten der Inertialmessung werden über RS232 an die Host-VBOX gesendet. |
| Grün | Voll betriebsbereit. | Die Daten der Inertialmessung werden über CAN-Bus an das Host-System gesendet. |