Vorteile der IMU- und Kalman-Filter-Integration für die Schräglaufwinkelmessung

Was ist Schräglaufwinkel?
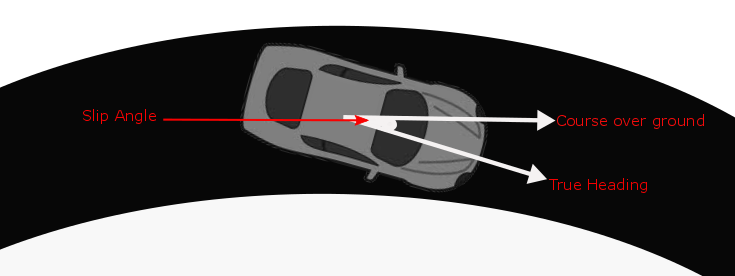
Der Schräglaufwinkel der VBOX3iD/VBOX3iDR ist der Unterschied zwischen den Kanälen der Fahrtrichtung des Fahrzeugs (Kurs über dem Erdboden gemessen von der primären GPS-/GNSS-Antenne) und der Drehrichtung des Rades (von der GPS-/GNSS-Doppelantenne gemessen). Dies wird auch als tatsächliche Fahrrichtung (True Heading) bezeichnet.
Der Schräglaufwinkel und der versetzte Schräglaufwinkel werden von diesen beiden Komponenten, die von der GPS-/GNSS-Antenne abgeleitet werden, berechnet.