Inertialmesssystem

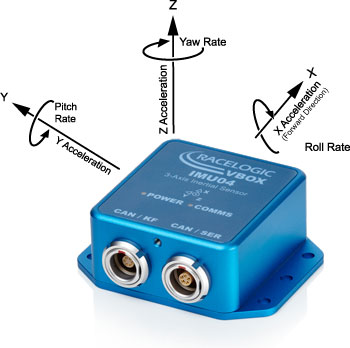
Inertialmesssystem (RLVBIMU04)Das Inertialmesssystem von RACELOGIC (IMU04) bietet hoch genaue Messungen der Nick-, Wank- und Gierrate über drei Drehratensensoren, sowie hoch genaue Messungen der Beschleunigung in x-, y- und z-Achsenrichtung mithilfe von drei Beschleunigungssensoren. Das CAN-basierte System ist temperaturkompensiert und verfügt über eine verbesserte Kalibrierung sowie eine erhöhte Stabilität. Die RLVBIMU04 kann entweder als Einzelsensor mit einfacher Anschlussmöglichkeit und leichter Konfigurierbarkeit über die CAN-Bus-Schnittstelle oder gemeinsam mit einem VBOX-GPS-Datenlogger eingesetzt werden. Beim Einsatz in Verbindung mit der VBOX 3i können die IMU-Daten nahtlos in das GPS-System integriert werden, um bei Nick- und Wankwinkelmessungen eine Genauigkeit von bis zu 0,06˚ (RMS) sowie gleichmäßigere Geschwindigkeitsdaten zu erzeugen. Dadurch wird sichergestellt, dass selbst bei Unterbrechungen des Satellitensignals GPS-Daten zur Verfügung stehen. Das Gehäuse der IMU ist spritzfest gemäß Schutzklasse IP67 und eignet sich zum Einsatz auf Booten oder unter rauen Bedingungen sowie bei Automobiltests. Die Verwendung einer 16-Bit-Messabfrage für alle internen Sensoren sorgt für einen hohen Grad an Genauigkeit. Dadurch werden bei der Gierrate typische Auflösungen von 0,0137 Grad pro Sekunde und bei der Beschleunigung Auflösungen bis zu 1,5 Millionstel der Erdbeschleunigung (milli-G) erreicht. Weitere Informationen über das IMU04 finden Sie auf unserer Webseite. |
 |
Gierratensensor (RLVBYAW03)Der VBOX Gierratensensor (RLVBYAW03) ist ein hochentwickelter Fahrzeug-Gierratensensor mit integrierten Beschleunigungssensoren. Die Beschleunigungssensoren werden in der X- und Y-Ebene zur Messung der Quer- und Längsbeschleunigung montiert. Das Gehäuse des Gierratensensors ist spritzfest gemäß Schutzklasse IP65 und eignet sich zum Einsatz auf Booten oder unter rauen Bedingungen. Die Verwendung einer synchronen 24-Bit-Messabfrage für alle internen Sensoren sorgt für einen hohen Grad an Genauigkeit. Dadurch werden bei der Gierrate typische Auflösungen von 0,01 Grad pro Sekunde und bei der Beschleunigung Auflösungen bis zu 0,001g erreicht. Der Gierratensensor eignet sich für die Verwendung mit den GPS-Datenerfassungssystemen der RACELOGIC VBOX-Reihe oder als Standalone-Sensor mit einem einfachen Anschluss und Konfiguration über die CAN-Bus-Schnittstelle. |
 |
 |
- IMU/YAW - Handbuch
- Dieses Handbuch bietet einen Überblick über den grundlegenden Betrieb der IMU, ihre Produktmerkmale und Spezifikationen.
- 01 - IMU/ YAW Funktionen
- 02 - IMU / YAW Setup-Parameter
- 03 - CAN-Modi der IMU / YAW
- 04 - Montage der IMU
- 05 - Verwendung der IMU-Integration mit VBOX 3i
- 06 - IMU-Integration - Kalman-Filterkalibrierung
- 07 - Nutzen von IMU/YAW als RACELOGIC CAN-Module mit VBOX
- 08 - Nutzen des IMU / YAW mit einem anderen Datenlogger
- 09 - IMU / YAW Firmware-Upgrade
- 10 - IMU / YAW CAN-Augabe
- 11 – IMU03 /YAW03 PIN-Belegung
- 12 – IMU04 PIN-Belegung
- 13 - IMU03 / YAW03 Technische Daten
- 14 - IMU04 Technische Daten
- 15 - Lieferumfang IMU / YAW
- IMU/YAW Knowledge Base
- Willkommen in der Knowledge Base. Hier finden Sie die beliebtesten, die am höchsten bewertesten und vor kurzem aktualisierte Artikel auf einen Blick. Sie können die Artikel auch per Schlagwort oder Titel durchstöbern. Sollten Sie einen gewünschten Artikel nicht finden können, benutzten Sie bitte die Suchoption.