LDWS - Gerade Fahrspur

Unser Spurhaltesystem ermöglicht eine exakte Messung von Bereich und Geschwindigkeit im Verhältnis zu einem definierten Fahrspurrand. Das System ist ideal zum Testen von Spurhalteassistenten (LDWS) geeignet.
Die VBOX 3iSL-RTK bietet in Verbindung mit der Video-VBOX und den CAN-Daten des Fahrzeugs ein komplettes Testpaket für Fahrzeuge. Das Testen von Spurhalteassistenten besteht aus zwei Schritten:
- Fahrspurvermessung
Während dieses Schrittes werden die Fahrspurränder an 2-8 Punkten vermessen.
- Testmessungen
Bei diesem Schritt werden die vermessenen Linienränder als Messreferenz in die Test-VBOX geladen. Dann kann die Spurhaltetestmessung durchgeführt werden, wobei die VBOX alle unten aufgeführten Parameter im Verhältnis zu dem vermessenen Fahrspurrand misst.
Konfiguration der Hardware
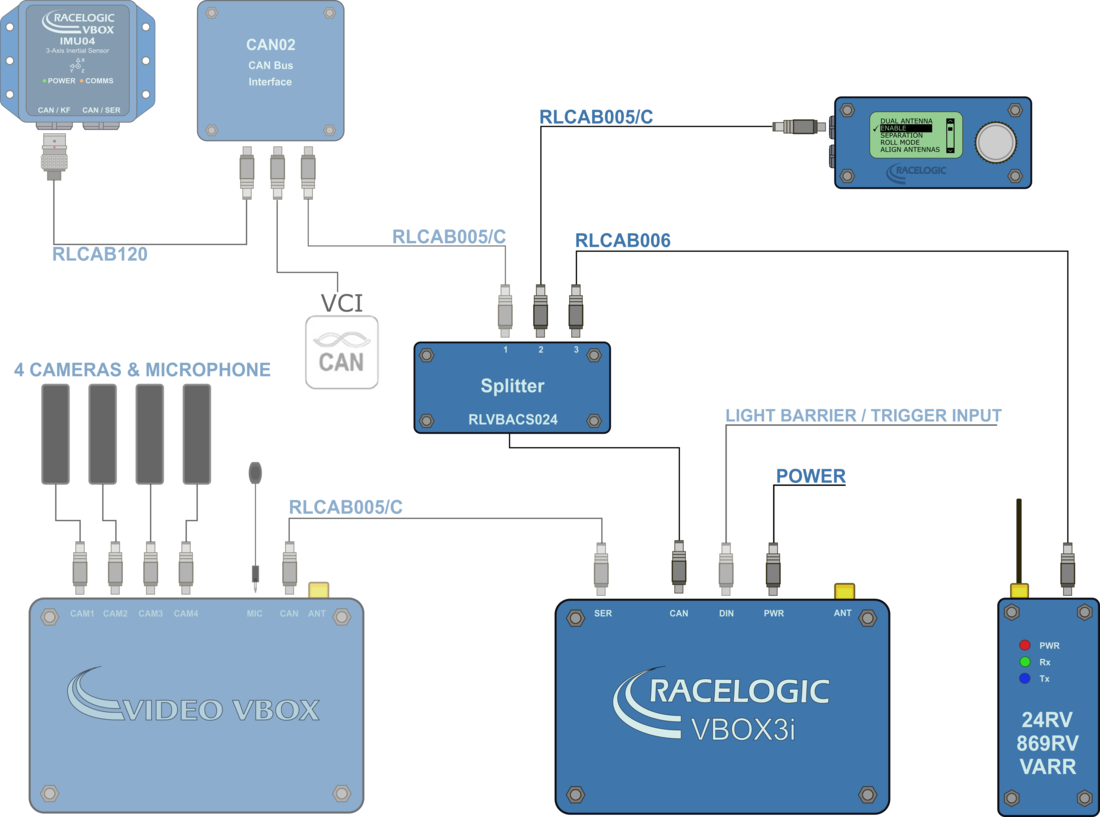
In den folgenden Abbildungen ist die empfohlene Hardwarekonfiguration für beide Fahrzeuge zu sehen. Die ausgegrauten Elemente sind nicht wesentlich, vielen Kunden können sie jedoch nützlich erscheinen.
Die Verbindung zwischen dem VB3i und dem Computer sollte für optimale Leistung über USB oder Bluetooth hergestellt werden.
Bitte stellen Sie sicher, dass alle Fahrzeugantennen korrekt positioniert und angeschlossen sind.
Testschema Spurhaltung
VBOX Konfiguration
Basisstation
Es muss eine statische Basisstation eingesetzt werden, damit die VBOX eine RTK-Positionsgenauigkeit von 2 cm erzielen kann. Das ist sowohl für die Fahrspurvermessung als auch während der Testmessungen erforderlich.
Es kann keine bewegliche Referenz eingesetzt werden, da nur mit einer statischen Basisstation eine Referenz für einen statischen Standort erstellt werden kann, der wiederum die Messung anderer statischer Objekte wie Fahrspurränder ermöglicht.
Weitere Informationen zu der Installation einer Basisstation finden Sie unter Benutzerhandbuch Basisstation.
Wichtiger Hinweis: Die GPS-Antenne der Basisstation muss für die Fahrspurvermessung als auch für alle nachfolenden Messungen an exakt der gleichen Stelle aufgestellt werden. Es hat sich außerdem in der Praxis bewährt, diesen Standort im Speicher der Basisstation abzuspeichern.
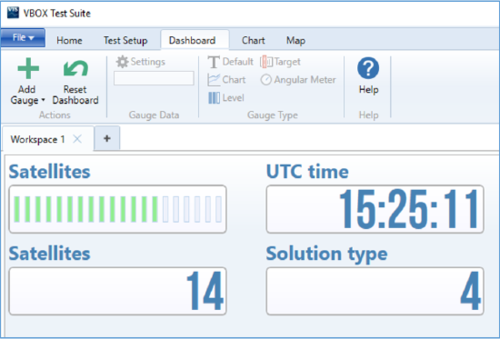
Bestätigen Sie, dass sich die VBOX-Einheit im RTK "Fixed" DGPS-Status befindet, angezeigt durch:
|
Auf der Vorderseite der VBOX wird der Status der erforderlichen RTK-Verbindung durch grünes Aufleuchten der DIFF-Lampe angezeigt. |
Ein live-Fenster von VBOX Tools mit der Dienstart zeigt RTK FIXED (RTK-Verbindung) an. |
|
Ein VBOX Test Suite Live Arbeitsbereich Fenster auf Solution Typ zeigt '4' (RTK fixiert). |

.jpg?revision=1)
.png?revision=1)
ProzessübersichtMit den FAS-Systemen von RACELOGIC stehen je nachdem, wie gerade der Fahrspurrand verläuft, zwei Einstellungsmethoden zur Verfügung. Folgende Skizze zeigt die Optionen zur Bestimmung der Spurhalteassistenzparameter.
|
.png?revision=1)
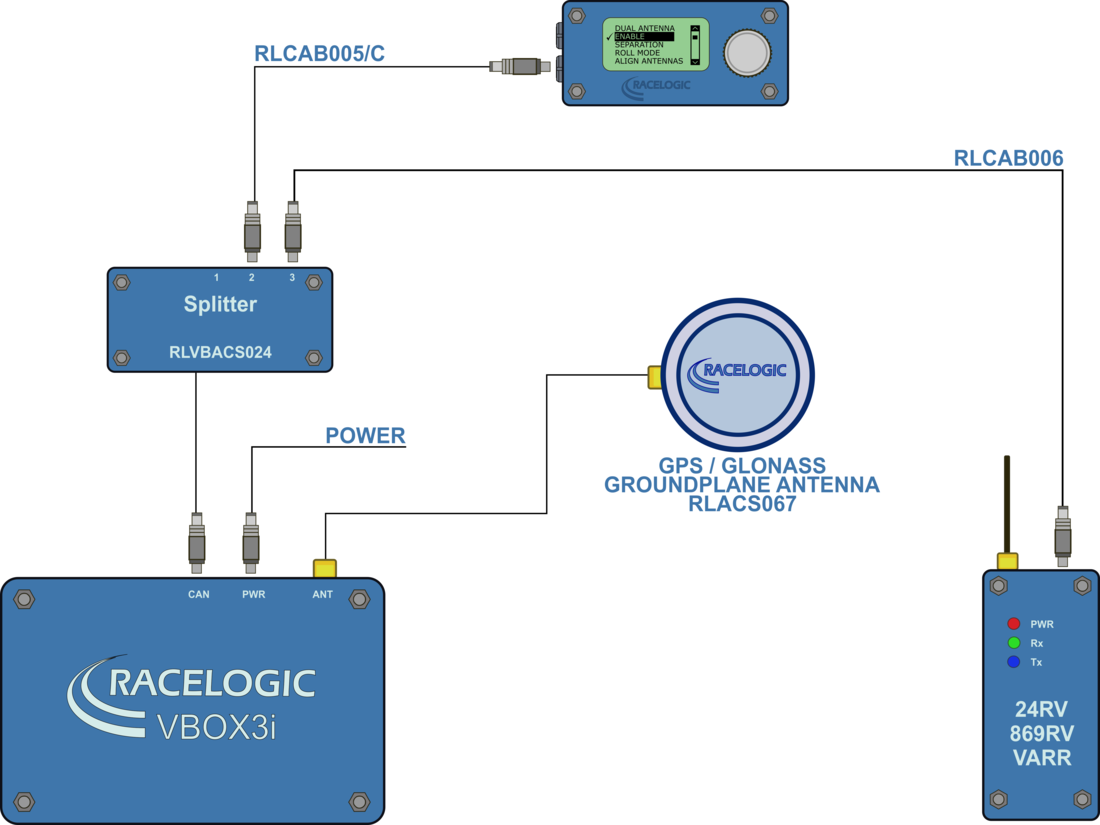
Konfiguration der Hardware – Fahrspurvermessung1. Schließen Sie die VBOX-Ausrüstung wie unter Konfiguration der Fahrspurvermessung dargestellt an. Hierzu muss die GPS-Antenne oben auf einem Vermessungsstab (RLACS168) montiert sein. 2. Öffnen Sie das Setup-Menü von VBOX Manager. 3. Wählen Sie die Option „VBOX“. |
4. Wählen Sie „LOG RATE“ (Abtastrate), stellen Sie die Rate auf „100 Hz“, und klicken Sie dann auf „BACK“ (Zurück), um zum „VBOX“ Setup-Menü zurückzukehren..png?revision=1) |
5. Wählen Sie „DYNAMICS“ (Dynamik), und stellen Sie den Dynamikmodus auf „NORMAL“. Dieser Dynamikmodus ist am besten für FAS-Tests geeignet. Kehren Sie nun zum „VBOX“ Setup-Menü zurück..png?revision=1) |
| 6. Wählen Sie „DGPS“, und stellen Sie den DGPS-Modus auf den gleichen 2 cm Modus ein, auf den auch die Basisstation eingestellt ist. Kehren Sie nun zum „VBOX“ Setup-Menü zurück. Weitere Informationen zu den RTK-Modi finden Sie unter RTK-Konfiguration. .png?revision=1) |
7. Wählen Sie „DGPS RS232 RATE“, und vergewissern Sie sich, dass „115200“ gewählt ist. Kehren Sie nun zum „VBOX“ Setup-Menü zurück.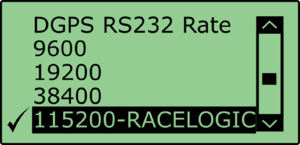
Achtung! Damit die VBOX DGPS-Korrektursignale erhalten kann, muss die richtige RS232-Rate eingegeben werden. Alle RACELOGIC-Radios im blauen Gehäuse verwenden 115200 kbit/s, die grauen Satel-Radios verwenden entweder 19200 kbit/s oder 38400 kbit/s. |
FahrspurvermessungIn der FAS-Firmware von RACELOGIC gibt es zwei Methoden zur Fahrspurvermessung. Wenn die Testmessung nur für gerade Fahrspuren durchgeführt werden soll, kann eine einfache Punkt-zu-Punkt-Fahrspur (mit bis zu 8 Punkten entlang der Fahrspur) mit einer VBOX 3i RTK und einem wie in dem folgenden Abschnitt „Gerade Fahrspur“ beschriebenen Vermessungsstab vermessen werden. Wenn die Testfahrspur nicht gerade genug ist, um durch 8 Punkte abgebildet zu werden, kann eine alternative Methode zur Bestimmung der Referenzspurdaten verwendet werden. Für diese Methode ist die Verwendung eines Vermessungswagens erforderlich (RLACS173-XXX, wobei XXX für die Frequenz der Basisstation steht). Bei Verwendung eines Vermessungswagens werden die Daten mit 10 Hz aufgezeichnet, was eine genauere Darstellung der Fahrspur einer kurvigen Straße ermöglicht. Anweisungen zum Zusammenbau der Ausrüstung finden Sie in der Gebrauchsanweisung des Vermessungswagens. |
Mehrere FahrspurenIn die VBOX lassen sich drei vermessene Fahrspuren laden, die dann individuell über VBOX Manager ausgewählt werden können. Die VBOX kann NICHT mehr als 1 Fahrspurrand gleichzeitig vermessen. Für eine Positionsgenauigkeit von 2 cm bei Tests von Spurhalteassistenten ist eine RTK-Basisstation erforderlich. |
Gerade Linie1. Schließen Sie eine VBOX-Ausrüstung entsprechend den Anleitungen unter Konfiguration der Fahrspurvermessung an. |
||
| 2. Positionieren Sie das Fahrzeug nahe des Randes der ersten Fahrspur, die Sie vermessen möchten. | ||
| 3. Montieren Sie die an das Fahrzeugsystem angeschlossene GPS-Antenne auf dem mitgelieferten Stativ oder auf einem geeigneten Vermessungsstab. | ||
| 4. Positionieren Sie das mitgelieferte Stativ über dem Fahrspurrand, und vergewissern Sie sich mithilfe eines Senkbleis, dass sich die GPS-Antenne direkt über dem Straßenseitenrand des Fahrspurrands ausgerichtet ist. | ||
| 5. Markieren Sie diesen Punkt mit Farbe oder Klebeband auf dem Boden, da Sie wieder an diesen Punkt kommen müssen, wenn Sie die Antennenversatzpunkte automatisch einstellen möchten. | ||
 |
.jpg?revision=1) |
.jpg?revision=1) |
|
6. Gehen Sie im VBOX Manager zu der Menüoption „LANE DEP“ (Spurhaltung), und wählen Sie „LANE 1“ (Fahrspur 1).
|
||
|
7. Klicken Sie auf die Option „SET LANE“ (Fahrspur einstellen).
|
||
|
8. Markieren und wählen Sie die Option „SET PNT 1“ (Punkt 1 einstellen), um diesen ersten Punkt zu markieren. 9. Bewegen Sie das Stativ und das Fahrzeug an einen anderen Positionspunkt auf der Linie, der vorzugsweise >50 m vom Ausgangspunkt entfernt liegt (je größer die Entfernung desto besser), und klicken Sie auf „SET PNT 2“ (Punkt 2 einstellen). Wenn Sie glauben, dass die Fahrspurrandmarkierung perfekt gemalt wurde, können Sie die Linie mit nur zwei Punkten beschreiben. Gehen Sie zu Punkt 11. |
|
|
|
Wenn Sie glauben, dass die Linie einige annehmbare Abweichungen aufweist, Sie diese jedoch so gut wie möglich bei der Vermessung dokumentieren möchten, können Sie mehr als zwei Punkte einstellen, um die Linie korrekt zu kartieren. Gehen Sie zu Punkt 10. |
||
| 10. Bewegen Sie das Stativ und das Fahrzeug an einen anderen Positionspunkt auf der Linie, der vorzugsweise >50 m von der vorherigen Position entfernt liegt, und geben Sie diese Position als nächsten Punkt ein, z. B. „SET PNT 3“ (Punkt 3 einstellen). | ||
| 11. Klicken sie nach dem Einstellen des letzten Punkts auf „BACK“ (Zurück), um zum Hauptmenü zurückzukehren.
Wiederholen Sie dieses Verfahren bis zu einem Maximum von 3 Linien für alle Ihre verbleibenden Testlinien. |
||
.png?revision=1)
.png?revision=1)

Einstellungen vor den MessungenEckpositionsbestimmungLaut „Lane Departure Warning System NCAP Confirmation Test December 2008“ des NHTSA „tritt eine Fahrspurabweichung ein, wenn ein beliebiger Teil des zweidimensional Polygons, welches das Testfahrzeug darstellt, vom Fahrspurlinienrand abweicht. Wenn Tests nach diesem Verfahren durchgeführt werden, übertritt die äußere vordere Ecke dieses Polygons den Linienrand zuerst“. „Die Ecken des Polygons werden durch die Punkte quer und längs definiert, an denen die Ebene der Außenkante jedes Reifens Straßenkontakt erlangt. Diese Ebene wird durch Ziehen einer Linie im rechten Winkel von der äußeren Reifenkante zum Untergrund definiert". Im Folgenden eine Anleitung zur Einstellung der linken und rechten vorderen Messpositionen. Schließen Sie die VBOX-Ausrüstung im Fahrzeug an, wie im Schema für den Spurverlassentest gezeigt. |
|
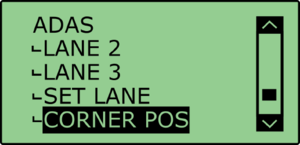
Automatische Eckpositionsbestimmung1. Wählen Sie unter der Option „LANE DEP“ (Spurhaltung) in VBOX Manager „CORNER POS“ (Eckposition).
|
|
|
2. Wählen Sie "SET FL POS" aus, während Sie die vordere linke Ecke des Fahrzeugs über dem anfänglichen Referenzpunkt von Spur 1 positionieren und in dieselbe Richtung zeigen, in der die Linie gesetzt wurde.
3. Wählen Sie für das automatische Einstellen der Eckpositionen „AUTO SET“ (Automatische Einstellung).
|
 |
| 4. Wiederholen Sie die Schritte 2-3 nach Bedarf für FR (vorne rechts), RL (hinten links) und RR (hinten rechts). | |
.png?revision=1)
_(1).png?revision=1)
.png?revision=1)
Manuelle EckpositionsbestimmungWenn die unterabgetastete Vermessungsfahrspur als Referenzfahrspur verwendet wird, kann die Automatikfunktion zur Eckpositionsbestimmung im VBOX Manager nicht verwendet werden. In diesem Fall müssen die Versatzwerte manuell im VBOX Manager eingegeben werden. |
|
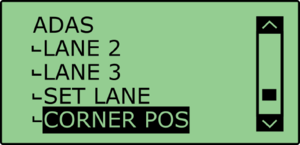
1. Wählen Sie unter der Option „LANE DEP“ (Spurhaltung) von VBOX Manager „CORNER POS“ (Eckposition).
|
|
2. Wählen Sie „SET FL POS“ (Position vorne links einstellen).
|
|
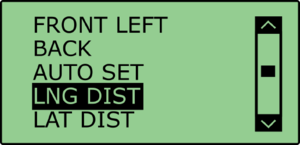
3. Wählen Sie für das manuelle Einstellen der Eckpositionen „LNG DIST“ (Längsabstand). |
|
4. Geben Sie den Wert für LNG DIST (Längsabstand) nach folgender Ausrichtung ein:
|
| 5. Wiederholen Sie Schritt 4 für LAT DIST (Querabstand). |
| 6. Wiederholen Sie die Schritte 2 bis 5 nach Bedarf für FR (vorne rechts), RL (hinten links) und RR (hinten rechts). |
_(1).png?revision=1)
.png?revision=1)
.png?revision=1)
Eckpositionen speichern und ladenSobald Eckpositionen in VBOX Manager eingestellt sind, können sie als .vbc-Datei gespeichert und zu einem späteren Zeitpunkt für Wiederholungszwecke wieder abgerufen werden. Wenn Sie .vbc-Dateien mit der Pre-Version der VBOX-Firmware Version 1.2.5 gespeichert haben, müssen Sie diese erneut laden und erneut speichern, um sie mit der neuesten Firmware kompatibel zu machen. HINWEIS: Damit Eckpositionen genau wieder abgerufen werden können, müssen die Position der GPS-Antenne auf dem Auto und der Standort der GPS-Antenne der Basisstation mit den jeweiligen Positionen übereinstimmen, wo sie sich befanden als die Daten aufgezeichnet wurden. |
|
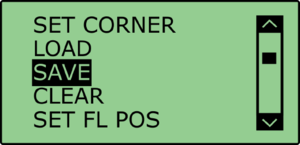
1. Wählen Sie unter der Option CORNER POS (Eckposition) im ADAS-Menü SAVE (Speichern).
|
| 2. Wählen Sie innerhalb des Menüs SAVE (Speichern) den gewünschten Dateinamen. Dies wird auf der CF-Karte als .vbc-Datei gespeichert. |
| 3. Wählen Sie zum Laden einer .vbc-Datei mit Versatzdaten die Option LOAD (Laden) im Menü CORNER POS (Eckposition). Hierdurch wird eine Liste der gespeicherten .vbc-Dateien mit Versatzdaten für die Eckpositionsbestimmung angezeigt. Durch Wählen der gewünschten Datei werden diese Daten in die Firmware der VBOX 3iSL-RTK geladen, sodass die Bereichswerte für diese Eckpositionen berechnet werden können. |
Glättung der FahrtrichtungEs gibt zwei konfigurierbare Variablen für die Glättung der Fahrtrichtungsdaten: SMOOTHING DISTANCE (Glättungsabstand) und SPEED THRESHOLD (Geschwindigkeitsschwellwert). Aufgrund der Natur von Fahrzeugabstandsmessungen und des Berechnungsvorgangs werden viele Kanäle von den möglicherweise verrauschten Fahrtrichtungsdaten des Fahrzeugs abgeleitet. Abhilfe bietet eine Glättung der Fahrtrichtungsdaten mit einer dynamischen Glättungsroutine. |
|
Wählen Sie unter der Option „LANE DEP“ (Spurhaltung) im „ADAS“ Menü die Option „SMOOTHING“ (Glätten).
|
GlättungsabstandDie Glättungsroutine wird über die Daten der aktuellen und der vorherigen Messungen berechnet. Die vorherige zu verwendende Messung wird durch Anwendung eines Glättungsabstands bestimmt. Das führt zu einer variablen Anzahl an Messungen, die zur Bestimmung des Glättungspegels der Fahrtrichtung herangezogen werden. Je geringer die Geschwindigkeit, desto mehr Messungen werden verwendet. Die Fahrtrichtung wird bei einer Abtastrate von 100 Hz und einem Glättungsabstand von 1,1 m bei einer Geschwindigkeit von 80 km/h über die letzten 5 Messungen berechnet, während die Fahrtrichtung bei 15 km/h über die letzten 26 Messungen berechnet wird. |
|
Wählen sie „SMOOTHING DIST“ (Glättungsabstands) und wählen Sie unter den Optionen von 0,00 m bis 2,00 m einen Glättungsabstand aus. Es wird ein Glättungsabstand von 2,00 m empfohlen.
|
GeschwindigkeitsschwellwertAufgrund der großen Anzahl an Messungen auf kurzen Entfernungen bei langsamer Fahrt kann der Fahrtrichtungskanal sehr verrauscht werden. Dies führt wiederum dazu, dass viele Fahrzeugabstandskanäle bei geringer Geschwindigkeit verrauscht werden. Wenn der Geschwindigkeitsschwellwert auf eine gewisse Geschwindigkeit gestellt wird, wird die Fahrtrichtung gesperrt sobald das Fahrzeug unterhalb dieser Geschwindigkeit fährt. |
|
1.Wählen Sie zum Einstellen des Geschwindigkeitsschwellwerts wieder „SPD TRHESHOLD“ aus dem VBOX Manager-Menü „SMOOTHING“ (Glättung), und geben Sie einen Geschwindigkeitsschwellwert ein.
2. Als Schwellwert wird 5 km/h empfohlen. |
.png?revision=1)
.png?revision=1)
.png?revision=1)