Wie funktioniert DGPS (Differentielles GPS)?

Wie funktioniert DGPS?
Differentielles GPS ist im wesentlichen ein System zur Bereitstellung von Positionskorrekturdaten für GPS-Signale. DGPS verwendet eine feste, bekannte Position, um Echtzeit-GPS-Signale zu korrigieren und Pseudostreckenfehler auszuschließen.
Ein wichtiger Punkt ist, dass DGPS-Korrekturdaten nur die Genauigkeit von Positionsdaten verbessern. DGPS hat keine Auswirkungen auf Ergebnisse, die auf Geschwindigkeitsdaten basieren, wie zum Beispiel Bremsergebnissen.
Was sind Pseudstreckenfehler?
GPS-Signale müssen auf ihrem Weg von den Satelliten auf die Erde mehrere Schichten der Erdatmosphäre durchqueren, was zu Laufzeitverzögerungen führt. Dies wirkt sich auf die Zeit aus, die ein Signal benötigt, um von einem bestimmten Satelliten zu einem GPS-Empfänger zu gelangen, was wiederum zu einem geringfügigen Fehler im GPS-Empfänger und damit in der gemessenen Position führt.
Was verursacht also diese Signalverzögerungen? Zunächst müssen die Signale durch die Ionosphäre, die die Außenschicht der Atmosphäre, reisen. Die Sonneneinstrahlung in dieser Schicht der Atmosphäre führt dazu, dass die Elemente sich teilen und positiv aufgeladen werden. Diese Schicht der Atmosphäre hat den größten Einfluss auf die durchreisenden elektromagnetischen Signale, was natürlich auch die Funksignale beinhaltet, die von den Satelliten abgegeben werden.
Die Ionosphäre fügt eine relativ große Verzögerung hinzu, die tatsächliche Anzahl hängt vom Empfängerstandort, Satellitenstandort, Tageszeit, Sonneneruptionsaktivität usw. ab. Viele dieser Faktoren werden geschätzt und berücksichtigt, was dann einer Verzögerung von bis zu entspricht 16 ns für das durchlaufende Signal - beachten Sie, dass dies eine grobe Zahl ist, die sich ständig ändert. Dies kann bis zu 5 m Fehler an der erfassten Position verursachen.
Die zweite Schicht, welche die GPS-Signale durchqueren, ist die Troposphäre. Das ist die „Wetterschicht" der Atmosphäre. Hier spielen sich also Wolken, Regen und Blitz ab. Dies führt zu einer kleineren Verzögerung des Signals von etwa 1,5 ns, was einen Positionsfehler von ungefähr 0,5 Meter nach sich zieht.
Diese Verzögerungen sind willkürlich und Schwankungen unterworfen. Daher ist es unmöglich, diese Verzögerungen zu irgendeinem Zeitpunkt messen und voraussagen zu können. Jede Verzögerung ist für jeden einzelnen Satelliten spezifisch, da die Satelliten in verschiedenen Bereichen auf der ganzen Welt positioniert sind, so dass ihre Signale unterschiedlichen atmosphärische Bedingungen unterworfen werden.
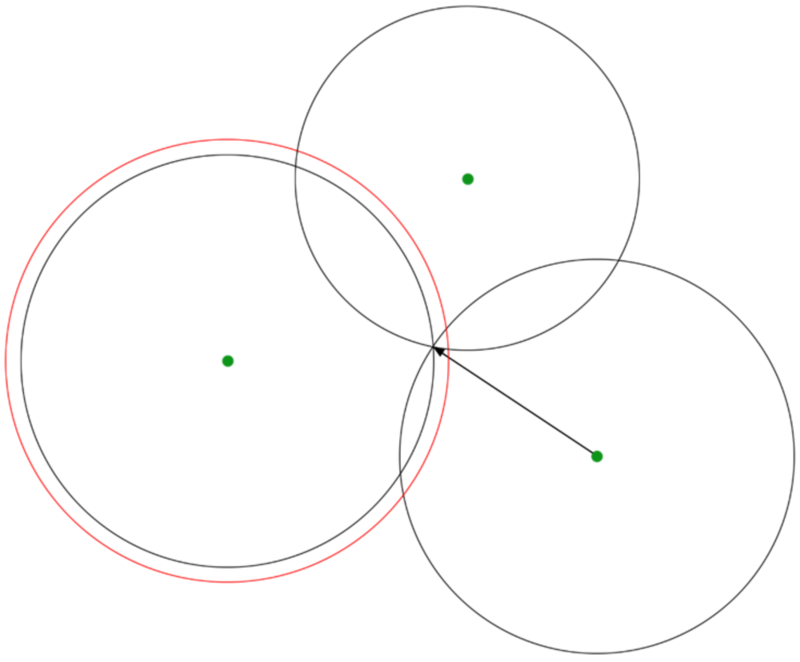
Dieses Bild zeigt, wie eine Zeitverzögerung vom Satelliten zur GPS-Antenne die aufgezeichneten Positionsdaten beeinflussen kann. Der rote Kreis zeigt den Fehlerbereich eines einzelnen Satelliten an, der durch die atmosphärischen Bedingungen hervorgerufen wird.
Korrektur von Signalverzögerungen
Statische Basisstation
Eine statische Basisstation kann verwendet werden, um Korrekturmeldungen für die Signalverzögerungen zu liefern. Dazu wird die Basisstation an einem bestimmten Punkt auf dem Boden aufgestellt. Anschließend wird die exakte Position der Basisstation auf der Erdoberfläche berechnet. Dazu lässt man die Basisstation so lange wie möglich GPS-Daten empfangen. Während die Basisstation die Daten erfasst, verändern sich die Ionosphäre und Troposphäre ständig, was wiederum dazu führt, dass die Signalverzögerungen sich willkürlich ändern. Da die Verzögerungen willkürlichen Veränderungen unterliegen, kann man einen Durchschnittswert ermitteln.
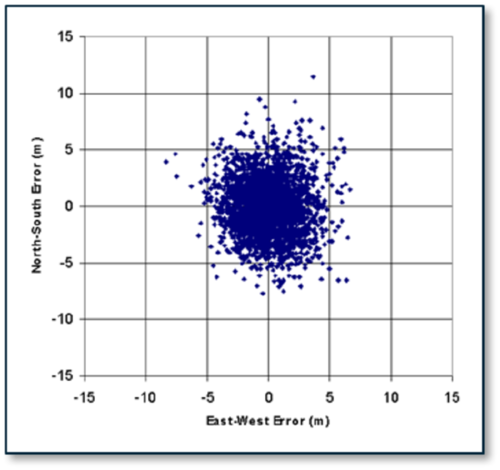
Dieses Bild zeigt ein Beispiel für einen 24-Stunden-Diagramm von GPS-Positionsdaten. Ermittelt man den Durchschnitt dieser aufgezeichneten Daten, erhält man einen sehr genauen Wert für die absolute Position der DGPS-Basisstation unter Eliminierung der meisten Fehler.
Die meisten professionellen VBOX-Einheiten können mit einer ortsfesten Basisstation eine absolute Positionsgenauigkeit von ± 80 cm erreichen. RTK-aktivierte VBOX-Einheiten können bei der Verwendung einer ortsfesten Basisstation eine Genauigkeit von bis zu ± 2 cm erreichen.
Geostationäre Satelliten
(SBAS - Space Based Augmentation System)
Eine andere Form der Signalkorrektur ist die Nutzung der Signale geostationärer Satelliten. Diese Satelliten befinden sich in einer festgelegten Entfernung zum Äquator und folgen der Erdrotation. Von der Erde aus betrachtet erscheint es, als ob Objekte, die sich in der geostationären Umlaufbahn befinden, stationär sind.
Ein Netzwerk von Basisstationen auf der Erde sendet Daten an einen zentralen PC, der die aktuellen Positionsfehler in diesem Gebiet berechnet. Diese Informationen werden zu den geostationären Satelliten gesendet, bevor sie dann zu den GPS-Empfängern weitergeleitet werden. Basierend auf der Position des Empfängers kann der aktuelle Korrekturversatz berechnet werden.
Obwohl dadurch das Niveau der Positionsgenauigkeit nicht so stark erhöht werden kann, wie das mit Hilfe einer statischen Basisstation der Fall ist, die über eine langfristige, stationäre Datenaufzeichnung verfügt, ist diese Methode schnell und einfach, da kein Aufbau erforderlich ist und die Daten überall genutzt werden können.
Die meisten professionellen VBOX-Einheiten können bei der Verwendung der Korrekturmeldungen geostationärer Satelliten eine absolute Positionsgenauigkeit von ± 1 m erreichen.
Der allgemeine Begriff für diese Systeme ist SBAS (Space Based Augmentation System). Die regionalen Systeme tragen folgende Namen:
USA
WAAS - Wide Area Augmentation System
.jpg?revision=1)
Europa
EGNOS – European Geostationary Navigation Overlay Service
.png?revision=1)
Japan
MSAS - Multi-functional Satellite Augmentation System.
India
GAGAN - Geo Augmented Navigation System.
Wie verwenden wir diese Informationen?
Wir kennen die genaue Position der Basisstation auf der Erde, sowie die genaue Position des Satelliten (ihre genaue Position wird kontinuierlich live übertragen). Wir haben also zwei bekannte Punkte.
Wir können also genau berechnen, welchen Abstand diese beiden Punkte haben sollten.Das „echte" Signal (in Rot dargestellt), welches die Ionosphäre und Troposphäre durchquert hat, wird um einen zufälligen Wert verzögert werden. Das „theoretische" Signal (grau dargestellt), sollte eine kürzere Strecke zurücklegen. Subtrahiert man die beiden, erhält man einen Korrekturwert, der auf den jeweiligen Satelliten angewendet werden kann.
.png?revision=1)
Differentielles GPS ist der Unterschied zwischen der „realen" Distanzmessung und der „theoretischen" Distanz.
Für jeden Satelliten, kann ein Korrektursignal an den GPS-Empfänger gesendet werden, der dann die Korrekturdaten bei jeder ausgeführten Messung anwendet. Dadurch wird ein Großteil der unterschiedlichen Pseudostreckenfehler der Satellitensignale aufgehoben. Dies funktioniert nur, weil der Empfänger sich in der Nähe der Basisstation befindet, so dass die Signale auf dem Weg zu beiden Einheiten die gleichen Schichten der Atmosphäre durchquert haben.
Welchen Unterschied macht das?
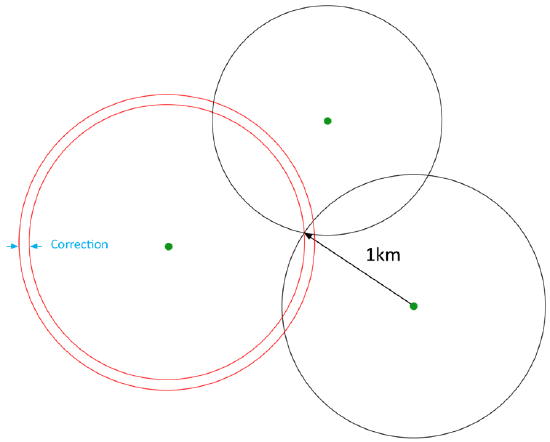 |
Der äußere rote Ring zeigt das Signal einschließlich Verzögerungen, die durch atmosphärische Bedingungen verursacht werden. Der innere rote Ring zeigt die Korrekturdaten, die gegenüber dem theoretischen Signal angewendet worden sind, so dass der Weg sich nun auf dem Schnittpunkt mit den anderen korrigierten Satellitensignalen befindet. |
| This 24 hour position scatter plot shows a commercial engine in red (Sat Nav's,Mobile Phones, etc.), an un-aided survey grade in blue (VBOX units), aided by SBAS corrections in green, aided by a 20 cm base station in purple, and you can just make out an RTK 2 cm aided system in yellow! | .jpg?revision=1) |
Absolute und relative Position
Die absolute Positionsgenauigkeit basiert auf dem geodätischen Referenzsystem WGS84 , während die relative Position ermittelt wird, indem man Messpunkte der aufgezeichneten Daten auf ihre Genauigkeit untersucht. Die erfasste relative Positionsgenauigkeit wird immer höher sein, da die atmosphärischen Bedingungen, die die Signale verzögern, sich nicht schnell genug ändern, um sich auf die Relation der aufgezeichneten Messpunkte untereinander auszuwirken oder diese verschieben zu können.
Mehr Informationen zur absoluten gegenüber der relativen Positionierung finden Sie hier.
Multiple Frequenzen
Eine andere Möglichkeit, um die Fehler zu messen, die durch Luftschichten verursacht werden, ist das Senden zweier Signale mit jeweils zwei verschiedenen Frequenzen von jedem Satelliten auf die Erde. Diese unterschiedlichen Frequenzen werden von der Atmosphäre in unterschiedlicher Weise beeinflusst. Zum Beispiel könnte das erste Signal einen Fehler von 1,2 Metern aufweisen, während das zweite einen Fehler von 1,4 Metern aufweist.
Da wir die Frequenzen kennen, mit denen diese Signale gesendet wurden, können wir herausfinden, wie stark jedes Signal verzögert wurde, indem wir die Differenz zwischen den beiden Verzögerungen berechnen.
Welche unterschiedlichen Arten von Frequenz stehen zur Verfügung?
- „L1" - „Normale"-GPS-Frequenz, die von allen RACELOGIC-GPS-Empfängern verwendet wird.
- „L2" - Diese Frequenz ist verschlüsselt, da sie nur für den militärischen Gebrauch bestimmt ist.
- „L2C" - Unverschlüsselte 'zivile' Signale auf der L2-Frequenz, die stärker sind als L1. Diese Frequenz wurde bei allen Satelliten hinzugefügt, die seit 2005 in Betrieb genommen wurden und ist zur Zeit bei ungefähr 19 Satelliten präsent. Obwohl eine vollständige Konstellation von 24 Satelliten noch nicht erreicht ist, wird die Frequenz übertragen und kann verwendet werden. Sobald eine vollständige Konstellation von 24 Satelliten verfügbar ist, wird die Genauigkeit der GPS-Positionsdaten (ohne die Verwendung einer Basisstation) von ± 3 m auf ± 1 m ansteigen. Diese Frequenz sollte innerhalb der nächsten paar Jahre voll funktionsfähig sein.
- „L5" - Alle Satelliten, die seit 2010 im Einsatz sind, verfügen über diese Frequenz. Diese Frequenz stellt mit ihrer verbesserten Leistung und Kodierungsschemata einen weiteren Schritt vorwärts dar. Sie wird auch als „Safety of Life" bezeichnet, da sie in erster Linie von Flugzeugen und Rettungsfahrzeugen verwendet wird, obwohl das Signal wie auch das der L2C-Frequenz unverschlüsselt ist. Während dies also weitere Verbesserungen in der Positionsgenauigkeit bringen wird, wird eine vollständige Konstellation wahrscheinlich erst nach 2020 für den allgemeinen Gebrauch zur Verfügung stehen.
Mit den zwei Frequenzen, die derzeit verfügbar sind (L1 und L2C), können unsere VBOX-Einheiten eine Positionsgenauigkeit von ungefähr einem halben Meter erreichen.
Verschiedene Arten von DGPS
- SBAS - Korrekturmeldungen werden von geostationären Satelliten gesendet, wie zum Beispiel EGNOS oder WASS.
- RTCMv2 - Korrekturmeldungen werden von einer statischen Basisstation gesendet, wodurch eine Genauigkeit von 40 - 80 cm erzielt wird.
- RTK - Korrekturmeldungen werden von einem statischen Basisstationssignal verschickt, das RTK-fähigen Geräten zu einer Genauigkeit von < 2 cm verhilft.
Siehe auch: